(Latest Revision:Aug 24, 2020)
[Aug 24, 2020: corrected two typographical errors]
[Jan 27, 2020: clarified language in first bullet under section 1.4.2]
Chapter One -- Introduction -- Lecture Notes
An OS performs as an intermediary between the user and the hardware,
functioning as a virtual computer that makes the use of the hardware more
convenient and/or efficient.
1.0 Chapter Goals
Describe the general organization of a computer system and the role of interrupts.
Describe the components in a modern multiprocessor computer system.
Illustrate the transition from user mode to kernel mode.
Discuss how operating systems are used in various computing environments.
Provide examples of free and open-source operating systems.
1.1 What Operating Systems Do
Roughly speaking, a computing system consists of hardware,
operating system, application programs, and a user.
Figure 1.1: Abstract view of the components of a computer system
1.1.1 User View - For many personal devices,
the main goal of the OS is to make the computer easy to use.
1.1.2 System View - the computer relies on the OS to allocate,
manage, and control the resources, such as CPU time, forms of memory,
and I/O devices.
1.1.3 Defining Operating Systems
Operating systems first emerged as a form of automation,
taking over tasks that had previously been performed
by the user, the operator, of the computer.
We may think of an OS as a collection of automatic
functions that make using the hardware easier, safer,
and more efficient.
Usually when computer science professionals refer to the operating
system, they mean something called the kernel.
The study of operating systems is mostly about the study of kernels.
1.2 Computer-System Organization
Figure 1.2: A typical PC computer system
Figure 1.2 in the text shows the typical components of a
personal computer: a bus, CPUs, primary memory, device
controllers, and peripherals. An operating system is
responsible for operating the peripherals by sending
instructions to device controllers. Different device
controllers have to be operated with their own special
commands, so usually an OS has a separate section of code
called a device driver, for interacting with each
different kind of device controller.
1.2.1 Interrupts
The OS tells devices what to do by sending commands
through the bus to registers in the device controllers,
but how do the devices communicate with the OS??
INTERRUPTS is by far the most common method.
Figure 1.3: Interrupt timeline for a single program doing output
1.2.1.1 Overview
Hardware can trigger an interrupt at any time by
putting a signal on the bus that is received by the
CPU.
For example device controllers interrupt the CPU
when they need attention from the operating system.
When the CPU receives an interrupt, it
saves some information about whatever is currently
executing in the CPU, and then jumps into a part of
the OS, called an interrupt handler.
The interrupt handler performs whatever actions are
required to respond to the device.
The operating system is able to use saved information to
resume the execution of whatever task was interrupted.
1.2.1.2 Implementation
After executing each instruction, the CPU
senses the part of the bus that carries interrupt
signals, the interrupt-request line.
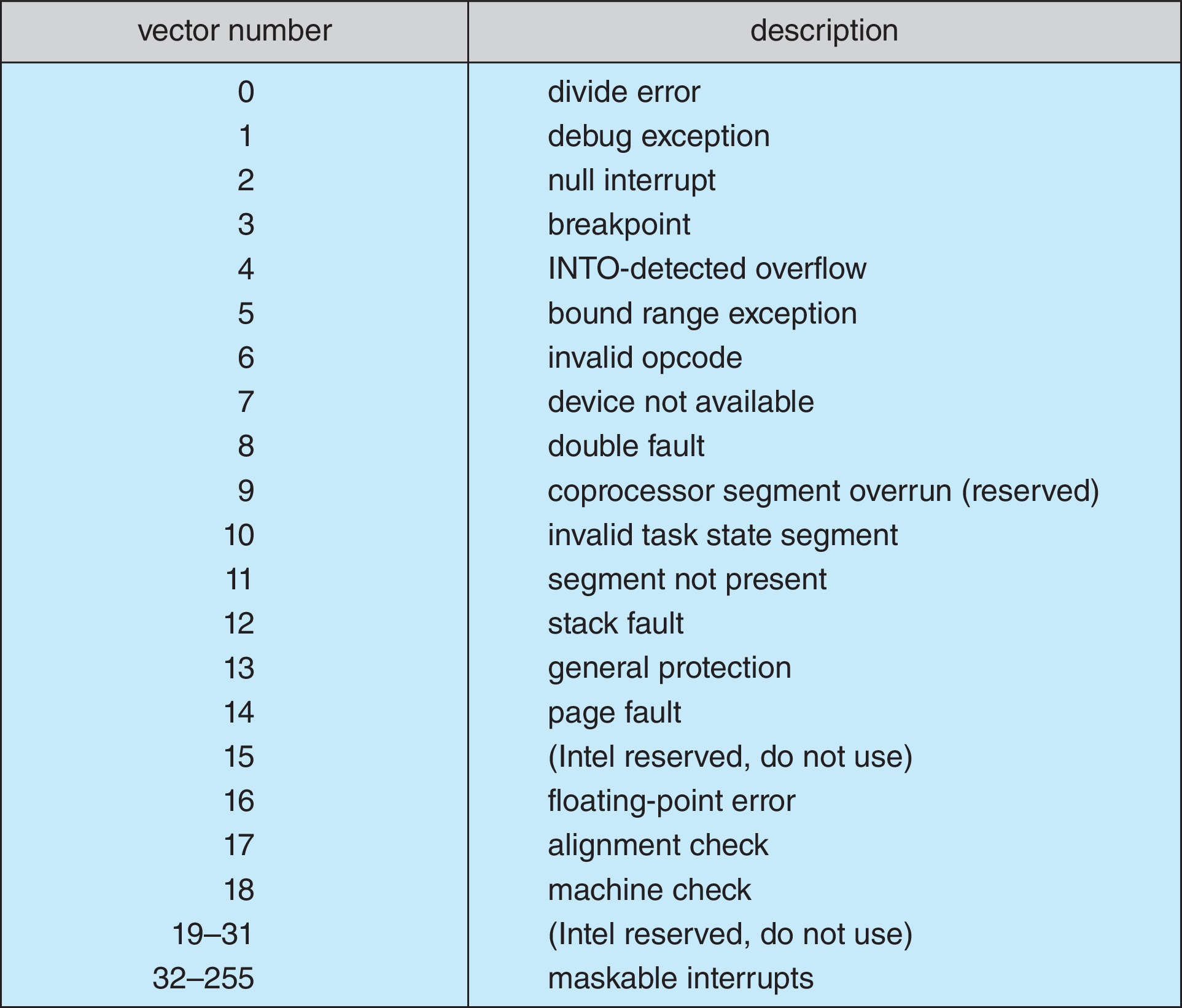
The details of the interrupt architecture may be
quite complex, employing such features as
an interrupt vector, interrupt chaining,
interrupt priority levels, interrupt preemption,
and interrupt masking.
It's important to know, and to bear in mind, that computers
can only fetch items from a few locations, like registers,
main memory & its caches, and certain types of read-only
memory (ROM). Therefore a computing system must copy data
and instructions from secondary memory to main memory
before the CPU can directly access those items.
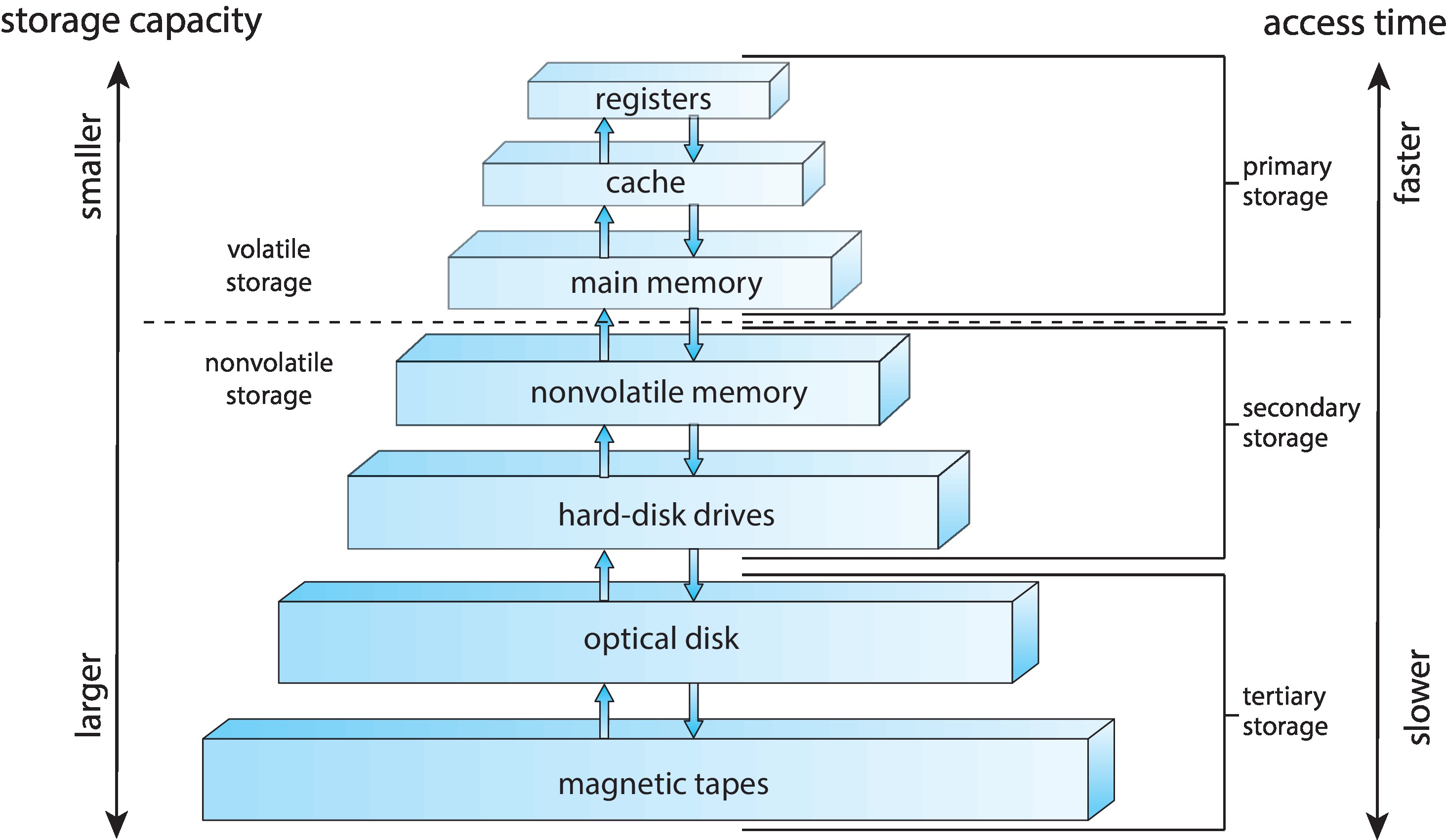
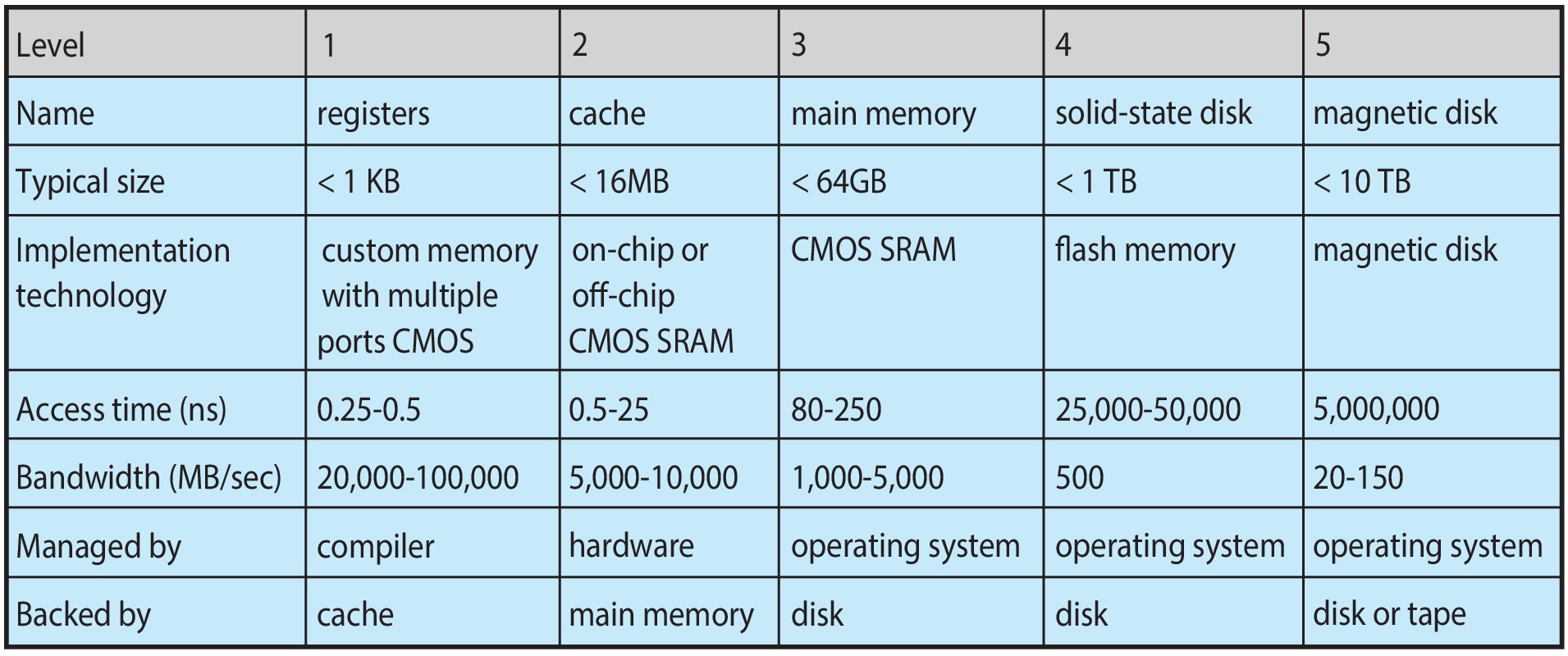
Modern computers utilize storage hierarchies, in which each
level of memory functions as a back-up for the levels above
it, and as a cache for the levels below it.
The forms of memory in the upper levels are typically
fast, but expensive and volatile.
Non-volatile memory is required for cost-effective
permanent storage of large amounts of programs and data.
The management of the various forms of memory is a major
part of what operating systems do. Chapter 9-15 of the
text book all deal, in whole or in part, with
memory management issues.
Figure 1.6: Storage-device hierarchy
1.2.3 I/O Structure
Some forms of I/O require that data be moved one byte
at a time between the device controller and the main
memory. When doing I/O this way, the controller has
to interrupt the CPU after transferring every single
byte. That's OK for devices that are inherently slow,
like keyboards.
For devices like hard drives with the ability to transfer
data at high speed, computing systems utilize direct memory
access (DMA). Only one interrupt per block transfer is
required with DMA. Software (usually the OS)
gives the I/O controller the base location and size
of a large array of bytes in main memory.
The controller then transfers an entire block
(multiple bytes) between the memory array and
the controller's internal buffer. The controller interrupts
the CPU only once, after the entire block has been transferred.
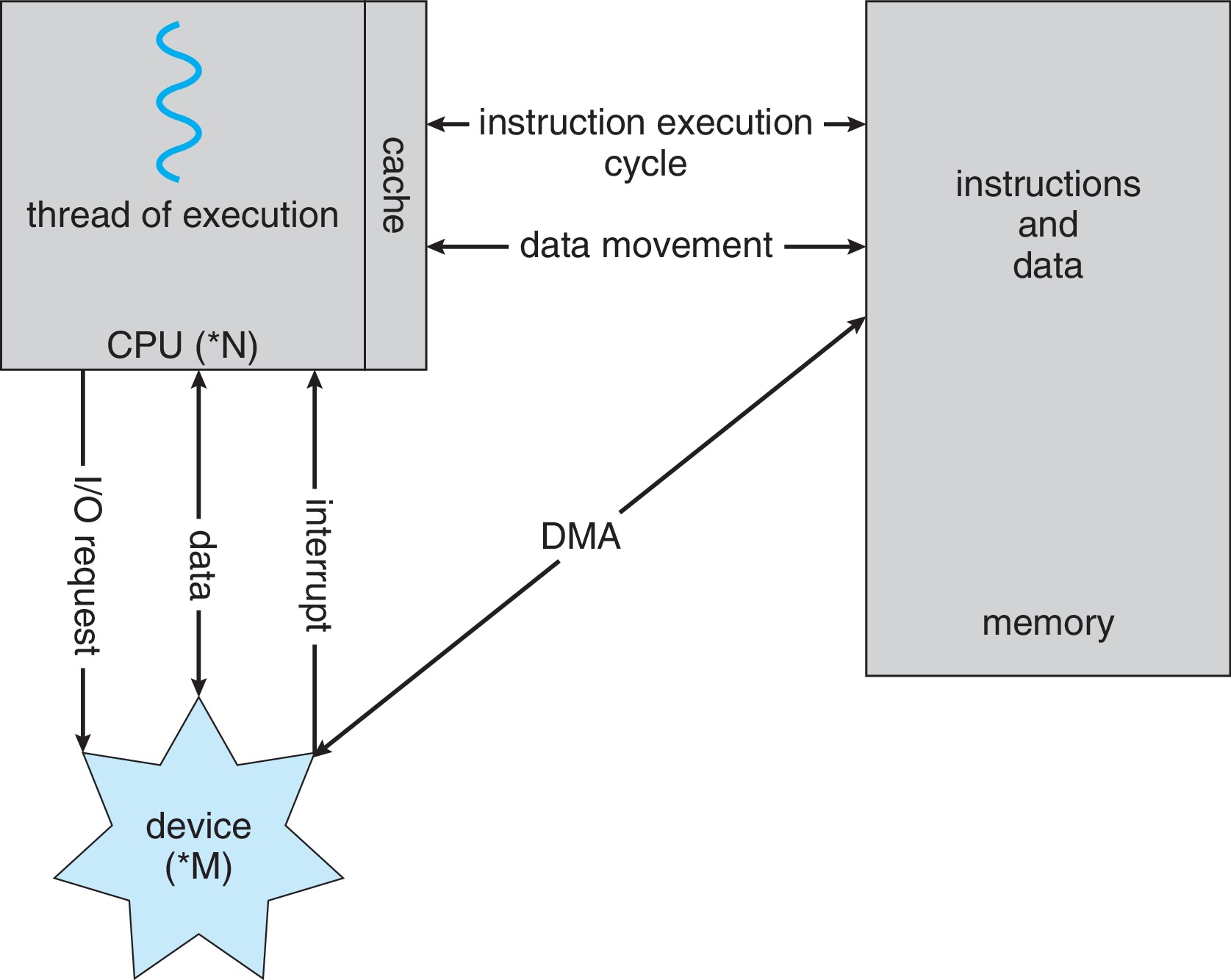
With DMA, the CPU is not interrupted as often, and so there's
more opportunity to use the CPU for other things during the time
that the I/O transfer is being performed. That helps the
system get more work done sooner.
Figure 1.7: How a modern computer system works
1.3 Computer-System Architecture
1.3.1 Single-Processor Systems
A single-processor computing system
(aka a uni-processor) is a computer
with only one CPU core, only one component capable
of executing a general-purpose instruction set.
Modern computing systems may contain processors
that are NOT general-purpose. For example, a
disk-controller might have a special-purpose
microprocessor that queues and schedules requests
for reading from and writing to the disk.
Even if it has such special-purpose processors,
a system with only one core is still a
single-processor system.
1.3.2 Multiprocessor Systems
What is a multiprocessor? The term refers to systems that
have more than one CPU core. Even if a computer has only
one CPU chip, it will usually be considered a multiprocessor
if that chip contains more than one (general-purpose) core.
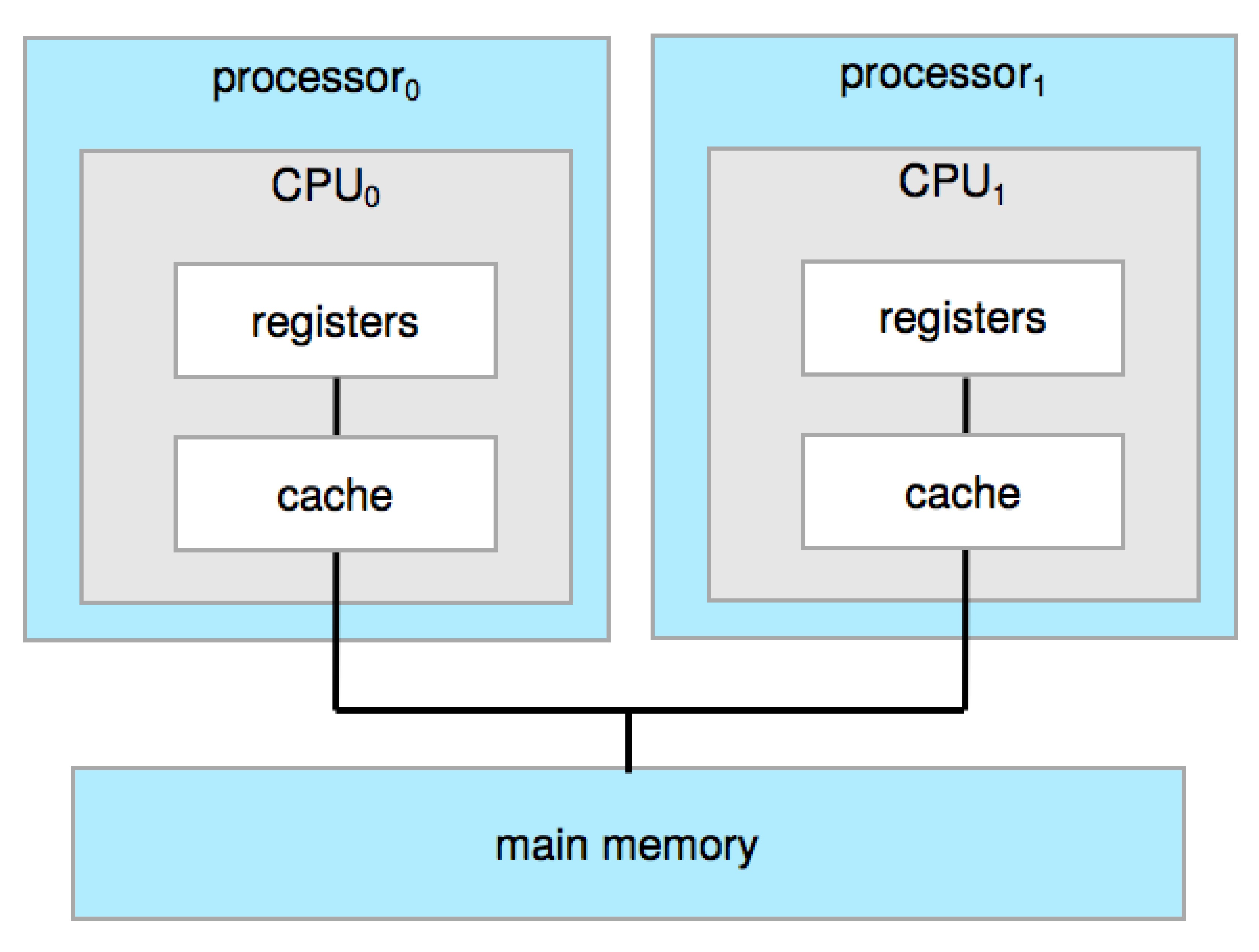
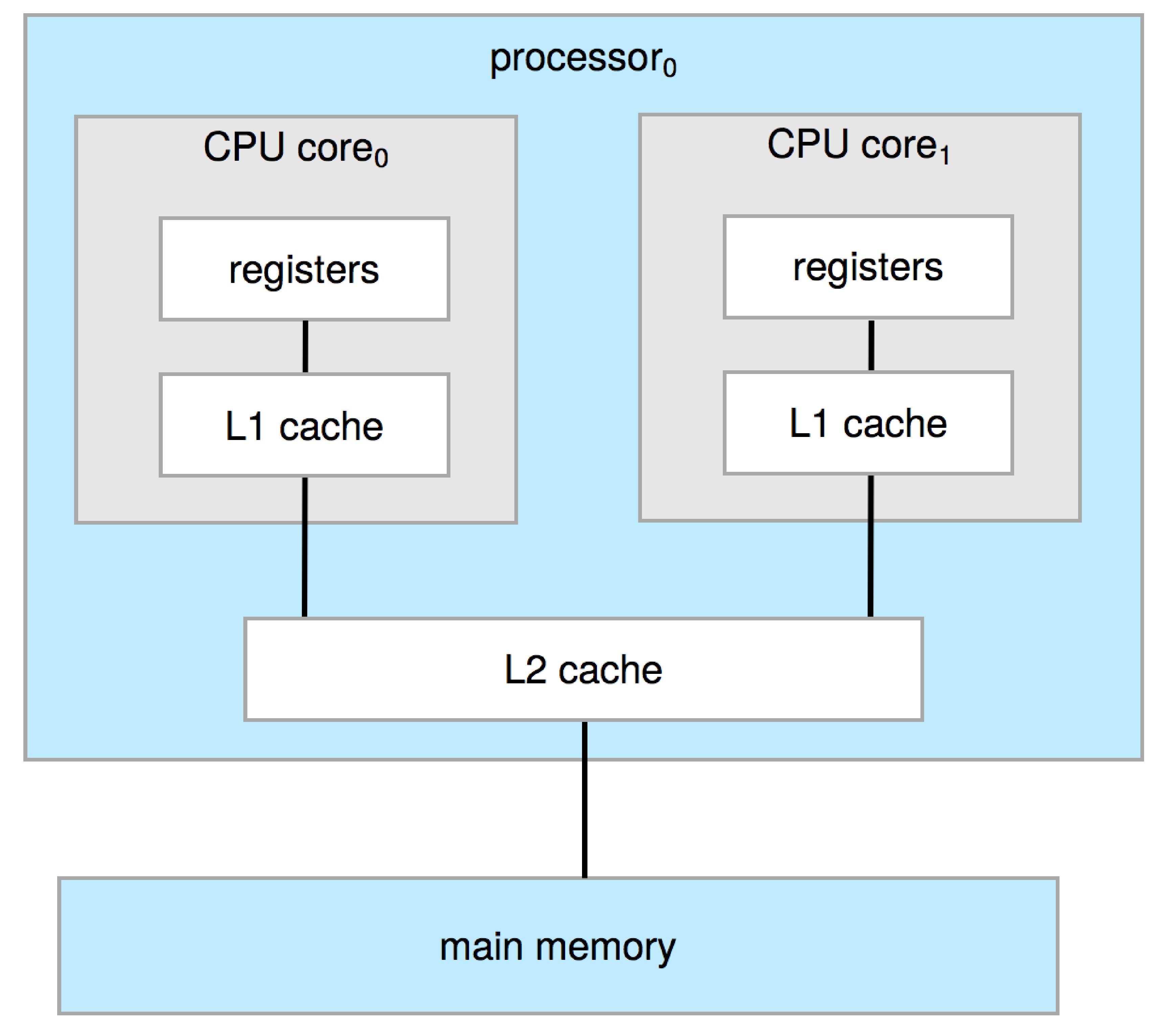
Most multiprocessors nowadays are symmetric multiprocessors
(SMPs). All the cores are equal peers. Each is made available
to perform all the same kinds of work as the others, including
operating system functions and the execution of user applications.
Figure 1.8: Symmetric multiprocessing architecture
Multiprocessors can run more than one sequence of instructions
simultaneously. More work can be done faster than on
a uni-processor.
It's a challenge for operating systems to derive the
maximum benefits from a multiprocessor, to keep all the cores
doing useful work as often as possible.
Multiprocessors can be more or less tightly coupled depending
on how much of the hardware resources (clock, cache, memory,
component connections) they share in common.
Figure 1.9: A dual-core design with two cores on the same chip
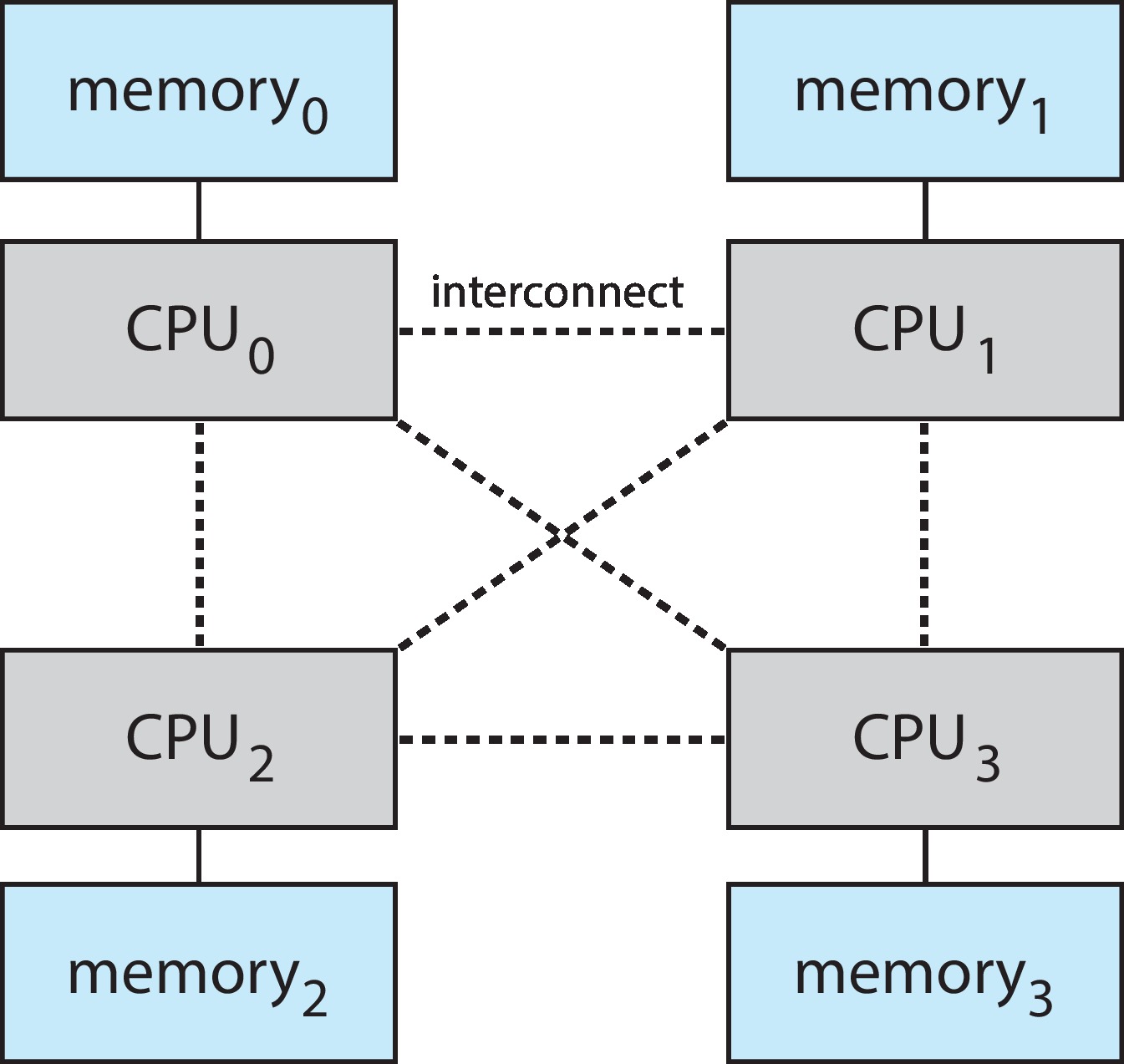
Non-uniform memory access (NUMA) architectures tend to be easier
to scale up with very large numbers of cores, and so they are of
increasing importance.
Figure 1.10: NUMA multiprocessing architecture
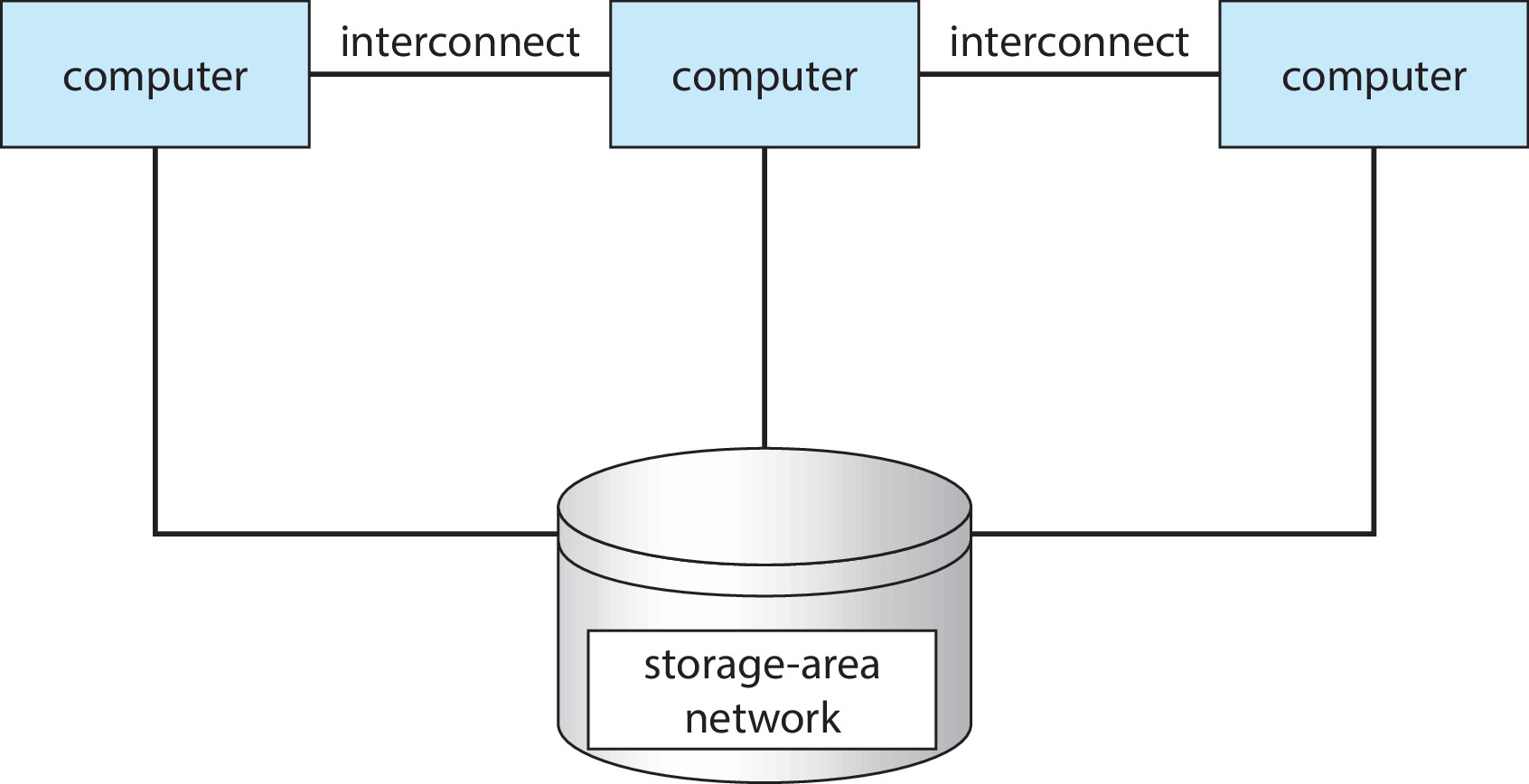
1.3.3 Clustered SystemsFigure 1.11: General structure of a clustered system
A clustered system is a loosely-coupled form of multiprocessing.
It is a group of individual computers that communicate closely
using a LAN or other high-speed interconnect.
A cluster usually has the job of providing a high-availability
service. Typically each of the machines is monitored by one
of the others, and if one machine has a failure, another machine
can take over for it.
1.4 Operating-System Operations
Usually computer hardware is designed to automatically run a program
in the ROM when the machine is turned on. This is the bootstrap program.
Some typical things it does are:
Initialize the hardware,
Find the operating system on disk or on a network,
Copy the OS to the primary memory, and
Execute the OS
Many operating systems, at boot time,
will start up a group of continuously running system programs,
often called daemons, to provide services.
An operating system that has nothing to do will sleep or wait until
a request for service arrives (an interrupt).
Interrupts can be generated by hardware or software. A software
interrupt is often called a trap or exception.
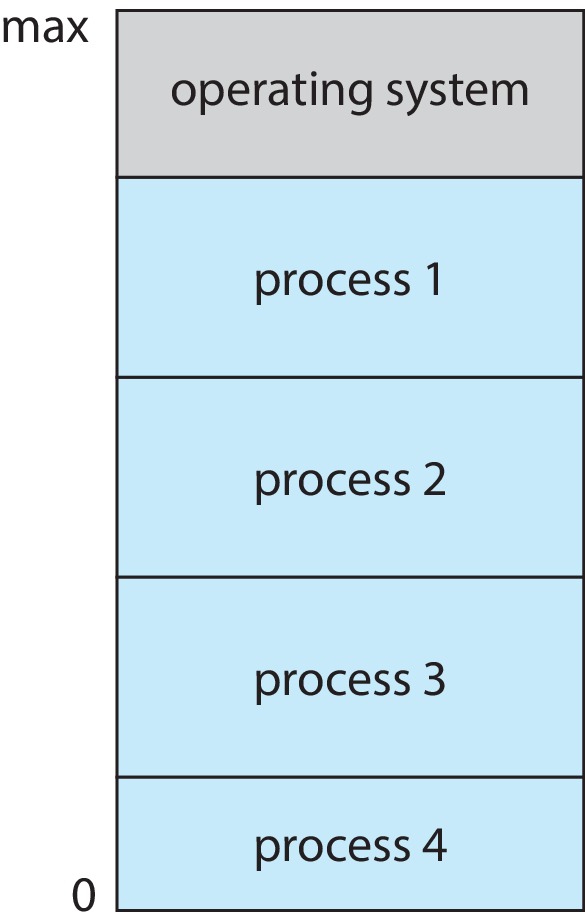
1.4.1 Multiprogramming and MultitaskingFigure 1.12: Memory layout for a multiprogramming system
A process is an executing program.
Most processes need to pause very often to wait for something
to happen. Usually they're waiting for I/O to complete, which
often takes a huge amount of time, relative to the speed of the
CPU.
How can the OS keep the CPUs busy when processes keep pausing
all the time?? Multiprogramming is the answer. Keep
a large number of processes in main memory. When a process
in a CPU pauses, choose one of the other process to run
in the CPU.
There's a form of multiprogramming called multitasking.
The OS switches processes in and out of CPUs so rapidly
that a user interacting with a process does not normally
notice the delay when the process is not executing.
Multiprogramming and multitasking are very desirable operating
system features, but the OS has to be very complex and
sophisticated to make it work.
Challenges include memory management, memory protection,
CPU scheduling, process synchronization, and
process communication.
Also interactive multitasking systems require
an efficient online file system, which requires many
sophisticated data structures and secondary memory management
techniques.
1.4.2 Dual-Mode and Multimode Operation
In order to assure that the hardware is operated properly,
usually only the operating system should be allowed to execute
certain commands, for example the commands that perform I/O, or
commands that allow one process to change the contents of
the main memory of a different process.
How is it possible to enforce such rules? The answer is to
have more than one mode of execution.
It is only possible to make this work by building it into the
hardware of the computer.
A simple way to do it is to have two modes of execution: user mode
and kernel mode (kernel mode may also called system mode,
privileged mode, or supervisor mode).
The hardware is built with a special
mode bit. The mode bit functions as if it was an
additional bit added to the code for each
machine language instruction. There are privileged instructions
that behave differently depending on whether the mode bit
is 0 (kernel mode) or 1 (user mode).
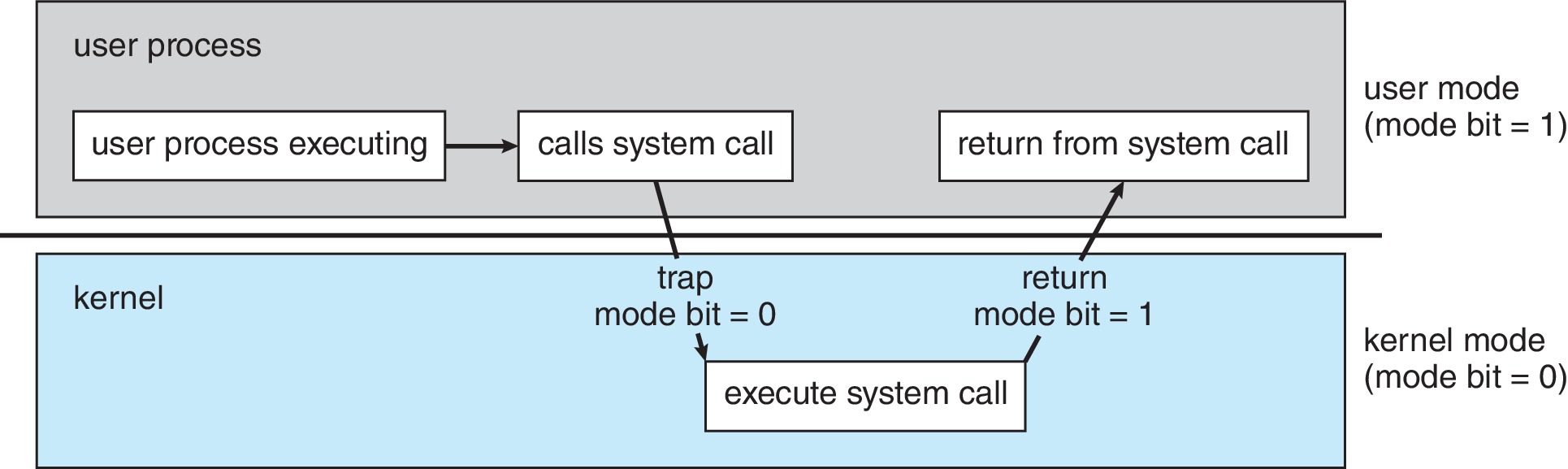
As an example, suppose a process tries to execute an instruction
that performs disk I/O. That is a privileged instruction.
If the value of the mode bit is 0, then
the disk I/O happens. However, if the
mode bit is 1, then something completely different happens: the
hardware sends a trap to the CPU. Next, the interrupt
mechanism causes the operating system to start executing,
which gives the OS the opportunity to
deal as it wishes with the user process that attempted
to execute the privileged instruction.
Figure 1.13: Transition from user to kernel mode
The mode bit is supposed to be 0 whenever the OS is executing,
and it's supposed to be 1 whenever a user process is executing.
How is this assured? Well, the hardware automatically sets the
mode bit to 0 when someone turns on the computer. Therefore
the booting system always starts in kernel mode.
The operating system always changes the mode bit to 1 just
before executing a user process. Therefore user processes
always start up (or resume) in user mode. Whenever there is an
interrupt, the hardware automatically sets the value of the mode
bit to 0. Therefore the OS always resumes executing in kernel mode.
Finally changing the value of the mode bit is a privileged
instruction, so a user process is not able to change it from
1 to 0.
Processes need to make requests for the services of the OS.
For example, a processes may request the OS to
perform I/O, or to allocate some memory for a data structure.
These requests are system calls. Processes typically
make system calls by executing an instruction that causes
a trap. The routine that responds to the
trap then performs the service requested by the process.
1.4.3 Timer
A timer is a special CPU register. Each time it executes a
user process in a CPU, the OS first places a number N in the timer.
After each clock tick, the hardware automatically decrements
the timer. If the value reaches zero,
the hardware immediately generates an interrupt.
This assures that the user process will allow the OS to
resume execution in the CPU after no more than N clock ticks.
The user process cannot disable or change the value in the timer.
Such operations are privileged instructions.
1.5 Resource Management
1.5.1 Process Management The OS has to
create and delete processes,
schedule processes (and threads) on CPUs,
suspend and resume processes,
provide mechanisms for process synchronization, and
provide mechanisms for process communication.
Chapters 3-7 discuss these things.
1.5.2 Memory Management The OS has to
keep track of which parts of memory are currently being
used, and which processes are using them;
allocate and deallocate memory space as needed; and
decide which processes (or parts of processes) and data
to copy into or out of memory.
Chapters 9-10 discuss these things.
1.5.3 File-System Management The OS has to
create and delete files,
create and delete directories (folders),
support primitives for manipulating files and directories,
map files onto mass storage, and
back up files on stable (nonvolatile) storage media.
Chapters 13-15 discuss these things.
1.5.4 Mass Storage Management Regarding mass storage,
the OS has to
mount and unmount devices,
manage free space,
allocate storage,
schedule disk accesses,
perform partitioning, and
provide protection.
Chapter 11 discusses these things.
1.5.5 Cache ManagementFigure 1.14: Characteristics of various types of storageFigure 1.15: Migration of integer A from disk to register
Some of the caching that goes on in computers is
controlled by the operating system, and some is not.
Chapter 10 covers some cache-replacement algorithms.
1.5.6 I/O System Management
Chapter 12 discusses the I/O subsystem, including such things
as memory management, a general device-driver interface,
and drivers for specific devices.
1.6 Security and Protection
Modern computing systems require security and protection.
The system grants only an authorized process access to a resource.
The OS must surveil the system and ensure that resources are
utilized safely and correctly.
Chapter 16 discusses security.
Chapter 17 discusses protection.
To maintain protection and security, the operating system
must manage certain kinds of data, such as user ID numbers,
group ID numbers, and passwords.
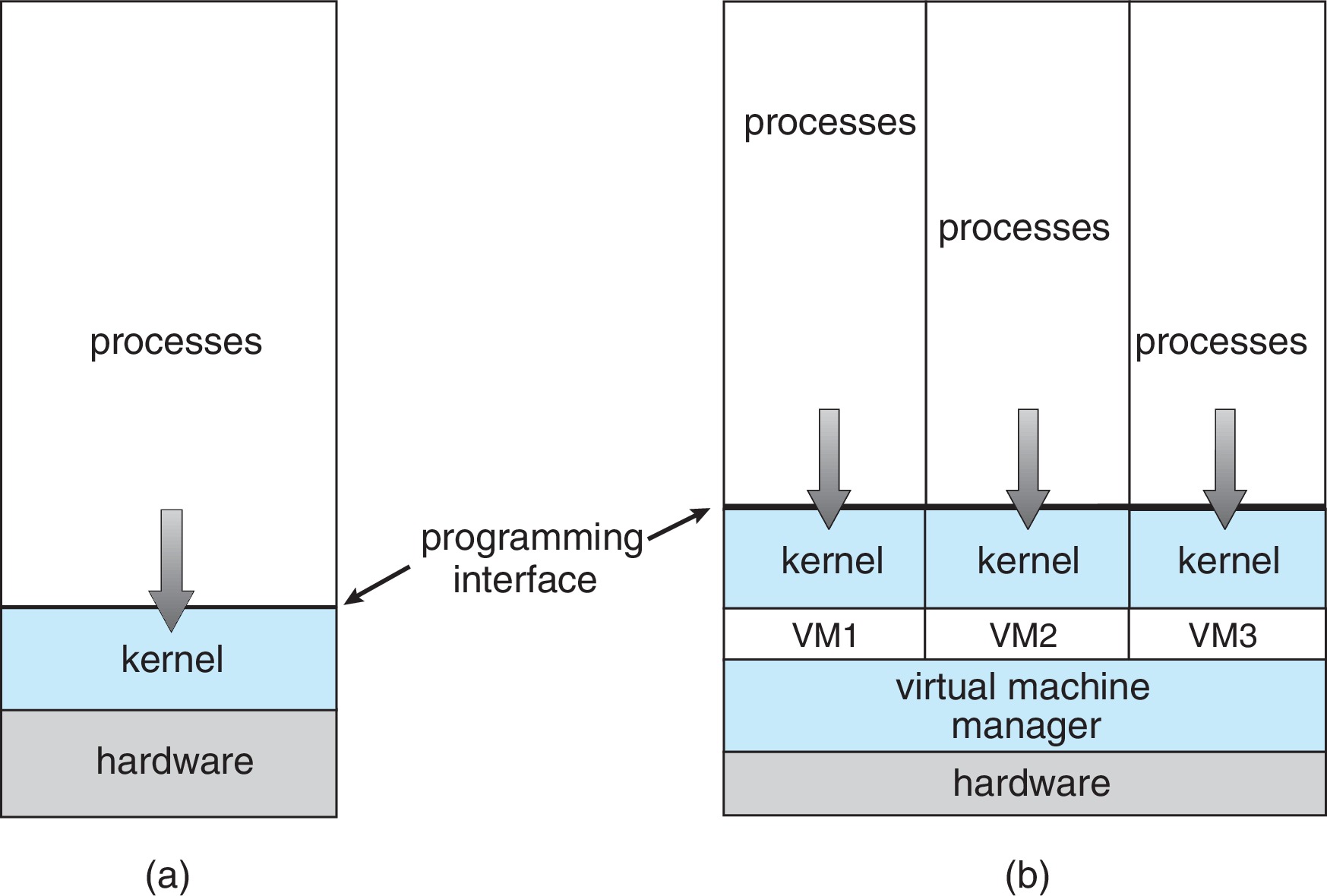
1.7 Virtualization
Figure 1.16: A computer running (a) a single operating system and (b) three virtual machines
Virtualization is a technology that enables one computer to function
simultaneously as several different computers, each with its own
operating system.
Under virtualization several guest operating systems can run 'on
top of' a host operating system, and all of these systems use the
computer hardware natively.
A person might use a virtualized operating systems to
run an applications that is not available on the host
operating system.
If someone develops versions of a new application
to execute on several different operating systems,
virtualization could allow
the developer to test and debug all the version on one
computer.
There is a Linux virtual machine provided with the text.
Chapter 18 discusses virtualization.
1.8 Distributed Systems
A distributed system is a group of computers that are connected by
a network in a way that allows users to get services from all the
individual computers.
Some distributed systems are very transparent, which means that
to use the system you only have to be aware of the one machine in
front of you. You don't have to be aware of the other machines,
or the network.
Chapter 19 has information about distributed systems.
1.9 Kernel Data Structures
Figure 1.17: Singly linked list
1.9.1 Lists, Stacks, and QueuesFigure 1.18: Doubly linked listFigure 1.19: Circularly linked list
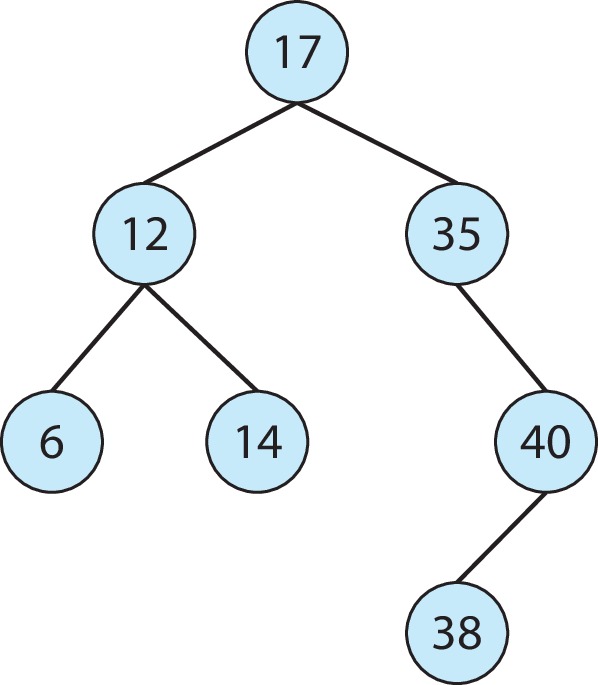
1.9.2 TreesFigure 1.20: Binary search tree
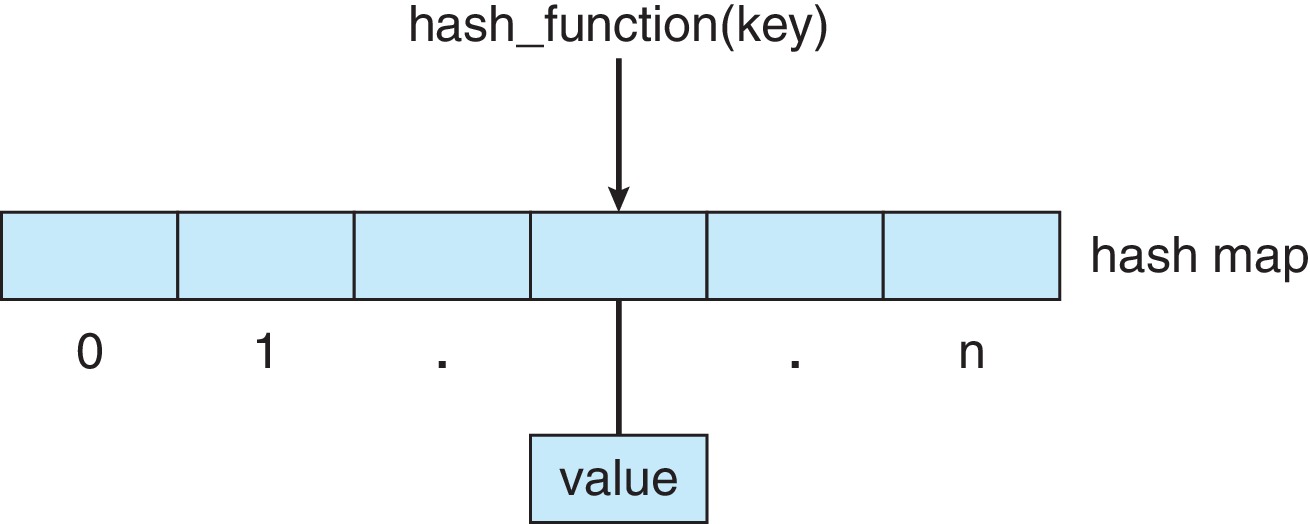
1.9.3 Hash Functions and Maps
1.9.4 BitmapsFigure 1.21: Hash map
A bitmap is just a string of bits used to keep track of
resource availability. To check on the i-th resource,
examine the i-th bit. If it's 0, the resource is available.
If it's 1, the resource is not available.
1.10 Computing Environments
1.10.1 Traditional Computing
Earlier in the history of computing, a common goal of
the technology was to help large numbers of people share
a very small number of computers, which was
necessary for affordability.
In the current era, it's common for each person to have
exclusive access to multiple advanced devices.
Convenience is now often a higher priority than efficiency.
Networks facilitate communication, as well as the
sharing of resources.
1.10.2 Mobile Computing
A mobile computer is one that is small and light enough
so you can walk around with it all the time - like a smart
phone or a tablet computer.
Nowadays mobile devices function as networked computers,
cameras, phones, navigational aids, they play and
record music and video, and more.
However, mobile computers are under-powered compared with
a typical laptop computer, and their memory capacities,
and processing speeds are significantly lower.
Chapter 2 has some discussion of Apple iOS and Google Android,
which are two leading operating systems used on mobile
devices.
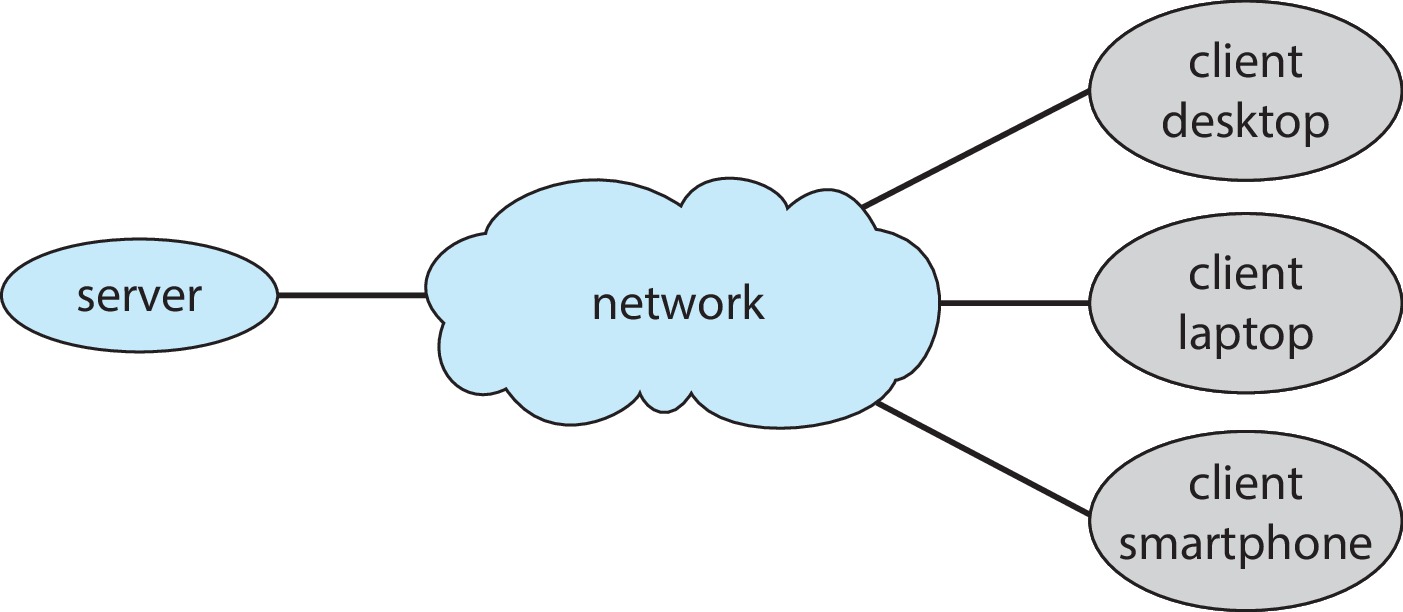
1.10.3 Client-Server ComputingFigure 1.22: General structure of a client-server system
In computer networks, programs called clients
connect to programs called servers and the clients
ask the servers to do something for them. This is how a
lot of things get done on computer networks.
For example, a client on a PC can ask a server on a super
computer to do a calculation that would take too long
if it was done on the PC. That is an example where
the service is computation.
Networks also use the client-server paradigm for file
service. A client running on a machine with a small amount
of space for files can keep most of its files on a remote
machine and get help from a server on the remote machine
whenever it needs to read from, or write to, one of the files.
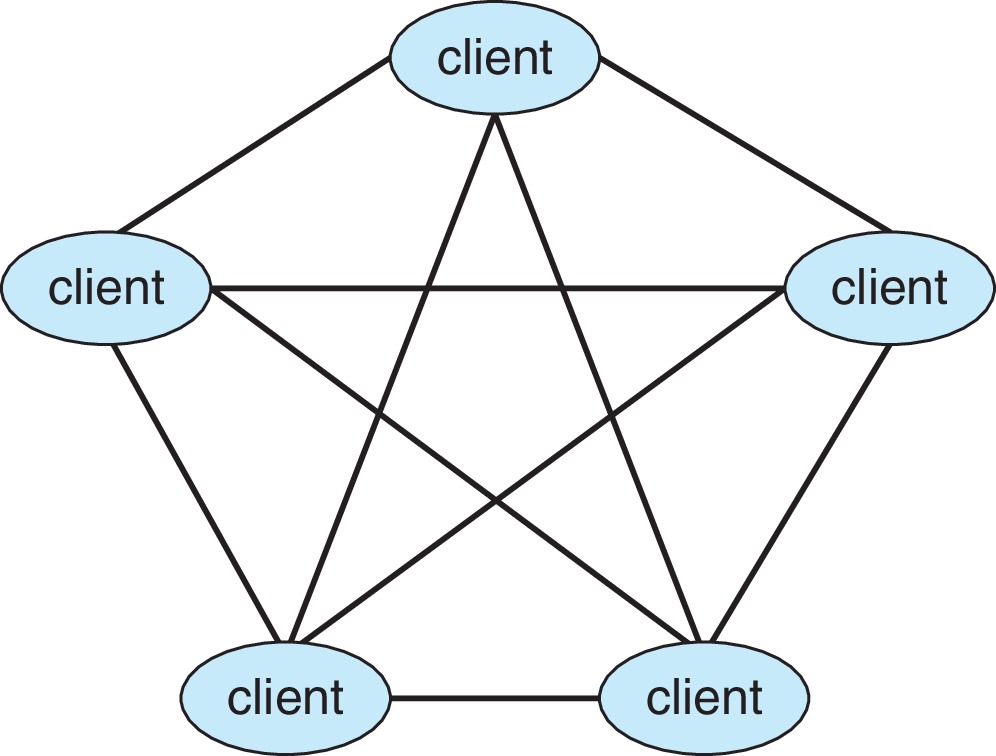
1.10.4 Peer-to-Peer ComputingFigure 1.23: Peer-to-peer system with no centralized service
If you start with client-server computing, but let clients
be servers sometimes, and vice-versa, then you get
the idea of peer-to-peer computing.
Successful applications include the file-sharing technologies
of Napster and Gnutella, as well as the voice-over-IP
technology of Skype.
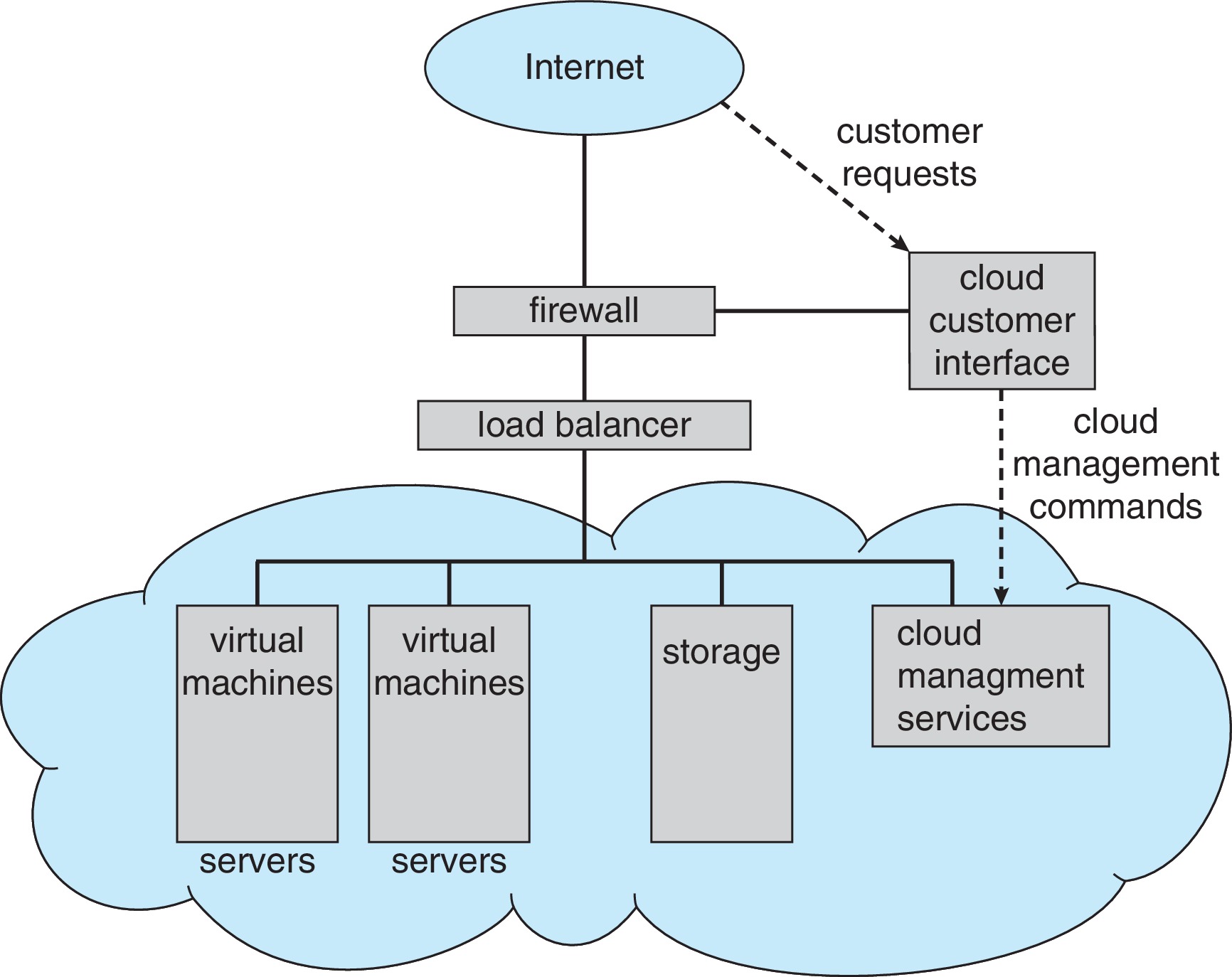
Cloud computing might be considered a form of client-server
computing.
Often the facilities where the servers execute
have very large numbers of processors, and amounts of secondary
storage.
Clients pay by the month just for what they use.
Servers can run software for clients, which is referred to as
software as a service (SaaS). The software can be
something sophisticated, or quite common, like a word processor.
There is also platform as a service (PaaS). A database
server would be an example.
There is infrastructure as a service (IaaS). Paying
for the ability to keep your files backed up on the server
machines in the cloud would be an example of IaaS.
1.10.6 Real-Time Embedded Systems
Most computers are actually embedded in devices like car
engines, factory robots, microwave ovens, and computer peripherals.
Many embedded computers don't have user interfaces.
Many don't have operating systems.
When they do have an OS it's usually a real-time OS.
A real-time system has to deal with time constraints
imposed by the (real) external environment, which
means starting and stopping activities at optimal
times, as time is measured in the outside world.
Issues regarding real time systems are discussed in
chapter 5 and chapter 20.
1.11 Free and Open Source Operating Systems
When software is open-source, it means that anyone is allowed to
obtain a copy of the source code. Free software is open-source
software to which additional rights are added, such as low or
no cost, permission to redistribute, possibly after modification.
Often communities of users and developers associated with
open source and free software spring up. They help debug
and make useful modifications to the software.
Reading and experimenting with free and open source operating
systems can be a good way to learn about operating systems.
1.11.1 History
In about the period 1950-1975, free and open source software
was very common.
By 1980, it was much less common. Companies had decided to
try to protect their profits by drastically limiting access
to source code, and giving most customers just compiled code.
1.11.2 Free Operating Systems
In the mid 1980s, notably led by Richard Stallman, the idea
was put forward that software should be "free," not necessarily
in the sense of "the price is 0," but in the sense of the word
"freedom."
The four principles of this kind of free software are that
users are entitled to:
freely run the program,
study and change the source code, and give or sell
copies either
with, or
without changes.
Stallman published a GNU Manifesto that argued all software should
be "free." He also formed a foundation called the Free Software
Foundation (FSF).
Nowadays "free" software can be routinely released through
the GNU General Public License (GPL).
1.11.3 GNU/Linux
GNU/Linux is a free operating system released under the (GPL).
The development of the software was greatly influenced by
Richard Stallman and Linus Torvalds. However there were many
other contributors.
There are references to Linux throughout the text, and chapter
20 is about Linux.
1.11.4 BSD UNIX
BSD Unix - The flavor of unix developed at UC Berkeley - was tied
to AT&T unix for some time & required a license, but
now is free of AT&T code, and is open source.
There are many descendants of BSD Unix, including the
Darwin kernel component code used in the Mac OS X.
1.11.5 Solaris
Solaris - originally the OS of Sun Microsystems was
based on Berkeley unix. Sun migrated to the AT&T based
Solaris in the 1990s, and eventually open-sourced most
of the code it developed.
1.11. 6 Open-Source Systems as Learning Tools
Open-sourcing is encouraging lots of creative projects.
Computer enthusiasts of all levels can participate in
the study and development of shared software.