(Latest Revision:
Dec 25, 2020
)
[2020/12/25: typo correction]
[2020/02/09: small changes in notes on 2.8.4 and 2.9.2]
Chapter Two -- Operating-System Structures -- Lecture Notes
2.0 Chapter Objectives
Identify services provided by an operating system
Illustrate how system calls are used to provide operating system services
Compare and contrast monolithic, layered, microkernel, modular,
and hybrid strategies for designing operating systems
Illustrate the process for booting an operating system
Apply tools for monitoring operating system performance
Design and implement kernel modules for interacting with a Linux kernel
2.1 Operating-System Services
Figure 2.1: A view of operating system services
Operating systems provide many services. Several are listed here.
The authors say that these OS services are mainly concerned with
helping users:
User Interface: There are different kinds, like touchscreen, GUI, and
command-line.
Program Execution: (Execute programs for users)
I/O operations: It is much too difficult for users to operate the I/O
hardware correctly without help.
File System Manipulation: The OS helps us store, organize, manage,
and protect our information.
Communications: Users need their processes to exchange information.
OSs help. The two main ways to do it are with shared memory and
by message passing.
Error Detection: An OS continually checks to see if something is
going wrong. The OS is programmed to take appropriate action.
The authors say that the following OS services are more for ensuring efficient
operation of the system itself:
Resource Allocation: For example, allocation of CPU time, main memory,
and online file space
Logging: An OS keeps a lot of records for many purposes, such as
accounting, fault detection, protection, and security.
Protection and Security: It is necessary to prevent user processes
from harming each other, or harming the OS.
2.2 User and Operating-System Interface
Operating Systems often include user-interface system programs. The text
lists three main types. These interfaces are NOT normally considered a direct
function of the operating system. Therefore, our text does not discuss user and
operating-system interfaces very much.
Figure 2.2: The bash shell command interpreter in macOS
2.2.1 Command Interpreters: The text-based interfaces on unix-type
systems are the most common examples nowadays. The user types commands with
a keyboard. The commands are displayed in an on-screen window or terminal.
Results produced by the commands are also displayed the same way. Commands can
be internal or external.
2.2.2 Graphical User Interface: These are screen, mouse, and keyboard
interfaces. There are multiple windows and menus arranged according to a
desktop metaphor. The KDE and GNOME environments are open software that
runs under Linux.
Figure 2.3: The iPhone touch screen
2.2.3 Touch-Screen Interface: These interfaces are common on mobile
devices. Users tap and swipe the screen to make selections. Some interaction
is audio-based. Users can type on a keyboard simulated on-screen.
2.2.4 Choice of Interface: Command Interpreters are powerful for
doing many challenging tasks, but require rather a long time to learn. GUIs
and Touch-Screen Interfaces make it easy to learn how to perform
commonly-needed tasks.
Figure 2.4: The macOS GUI
2.3 System Calls
A system call is like a function call. It is a request for an OS service.
System calls are very important. "System calls" is very much the
answer to the question, "What does the operating system do?"
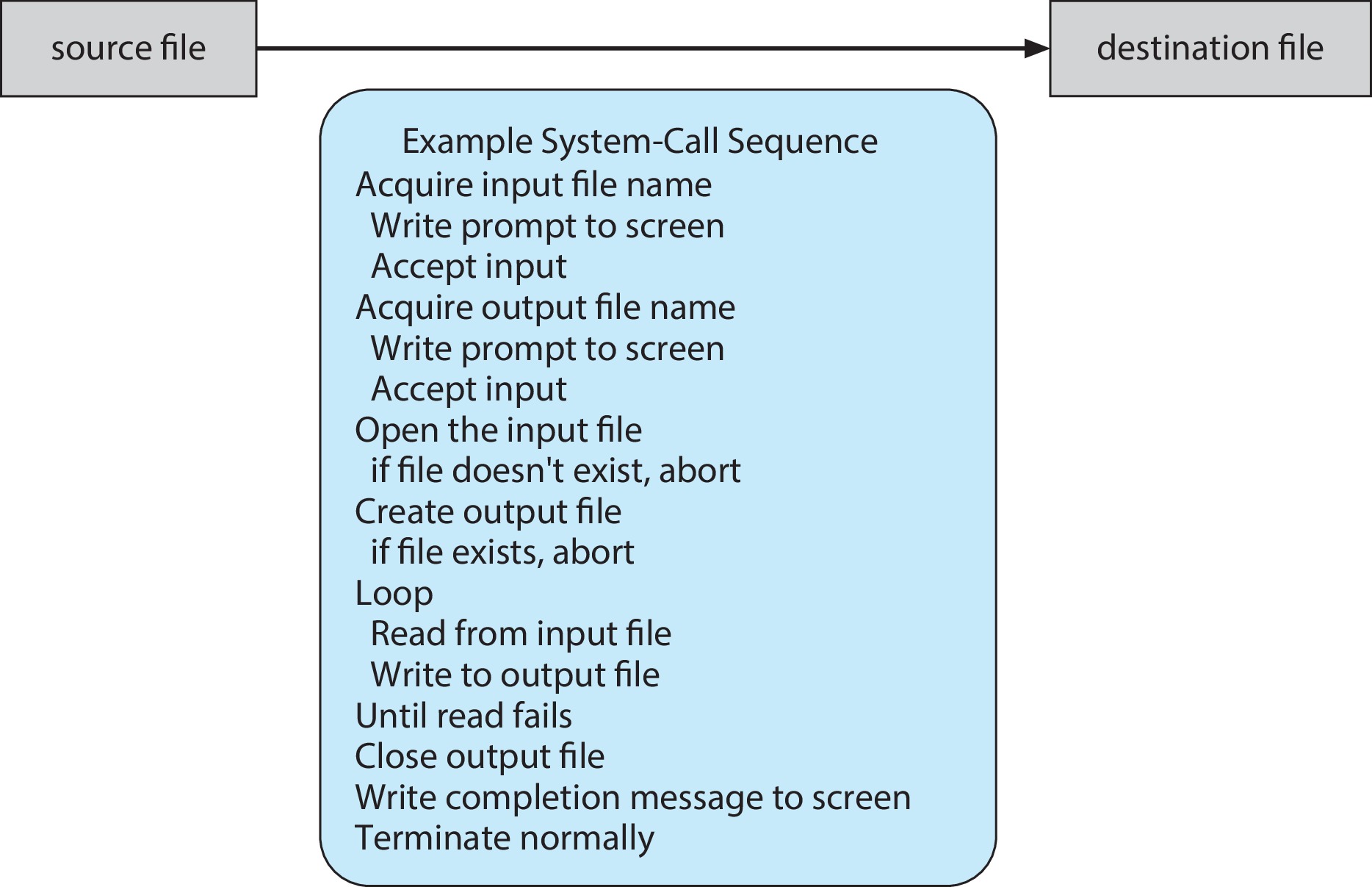
Figure 2.5: Examples of how system calls are used
2.3.1 Example: As an example, the text describes how a
simple program that makes a copy of a file has to make a large number
of system calls, involving keyboard, screen, and disk I/O.
2.3.2 Application Programming Interface: Even low-level
system programmers usually do NOT put system calls in their
program code. Instead they use an application programming interface (API)
which provides a library of functions. When a process calls an API function,
the API function, in turn, makes whatever system calls are necessary.
One of the benefits of using APIs is that the programs are easier
to port from one kind of computer to a different kind.
Also, system calls often have difficult-to-understand syntax, and use
of the API functions is simpler and easier. The three most common
APIs are the Windows API, the POSIX API, and the Java API.
The run-time support functions in libraries provide the system-call
interface for many programming languages - including C and Java.
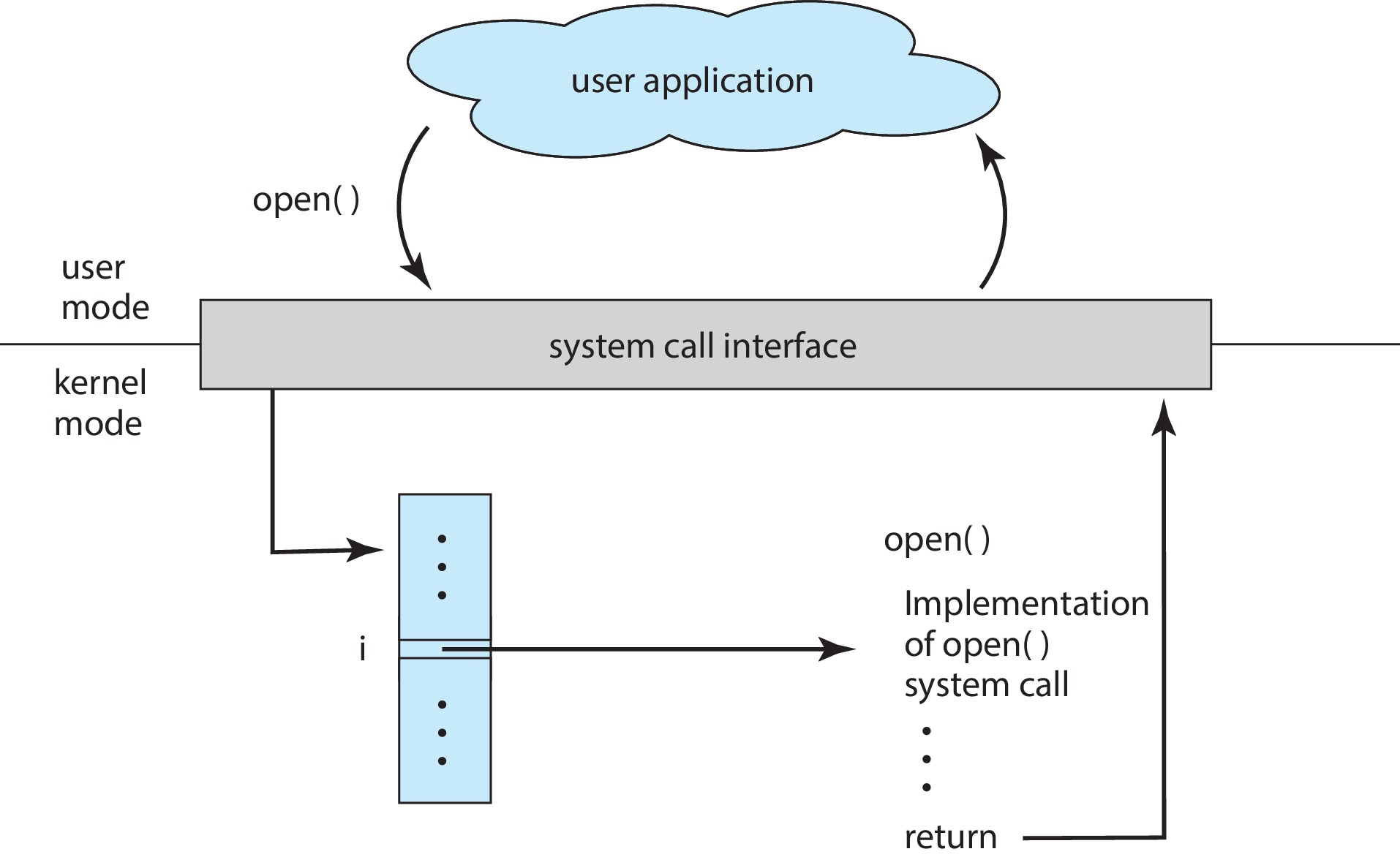
Figure 2.6: The handling of a user application invoking the open() system call
Typically, there is a number associated with each system call. To
implement a system call, the requesting process executes an instruction
that causes a trap. Of course, the trap puts an OS handler into the CPU.
The OS handler looks up the system call number in a table maintained
by the OS. The table entry tells the OS which piece of code it has to
execute to perform the system call, and the OS then executes that code.
(See figure 2.6.)
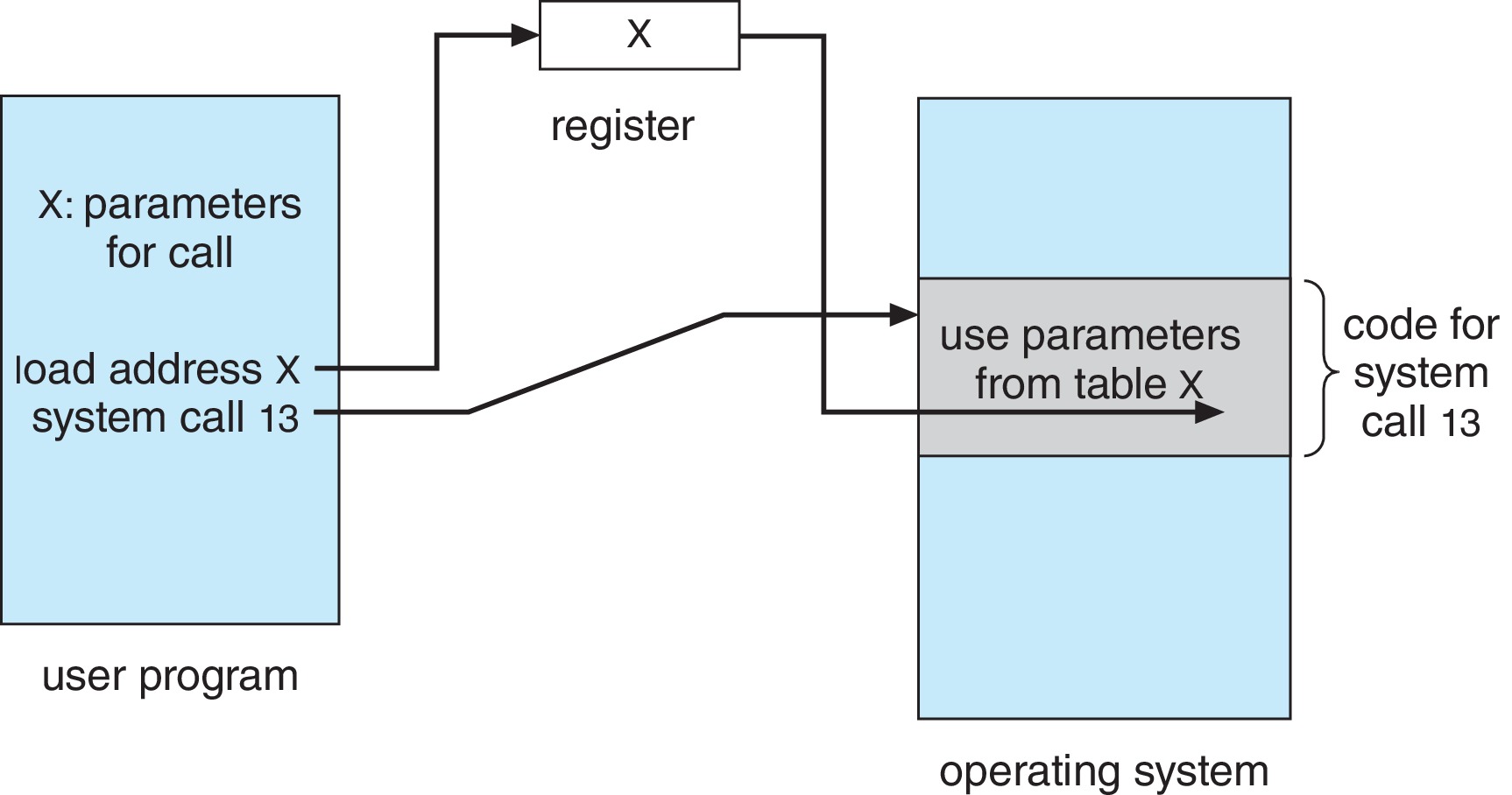
Figure 2.7: Passing of parameters as a tableimportant detail:
A process can pass parameters to a system
call by leaving them in CPU registers, by leaving them in a RAM
block (pointed to by an address in a register), or by pushing them
onto the runtime stack.
2.3.3 Types of System Calls
Much of what we study in the rest of the text will be about how to implement
the system calls listed here.
2.3.3.1 Process Control: Examples are
create process, terminate process,
load process, execute process, get process attributes, set process
attributes, wait for event, signal event, allocate memory, and
free memory.
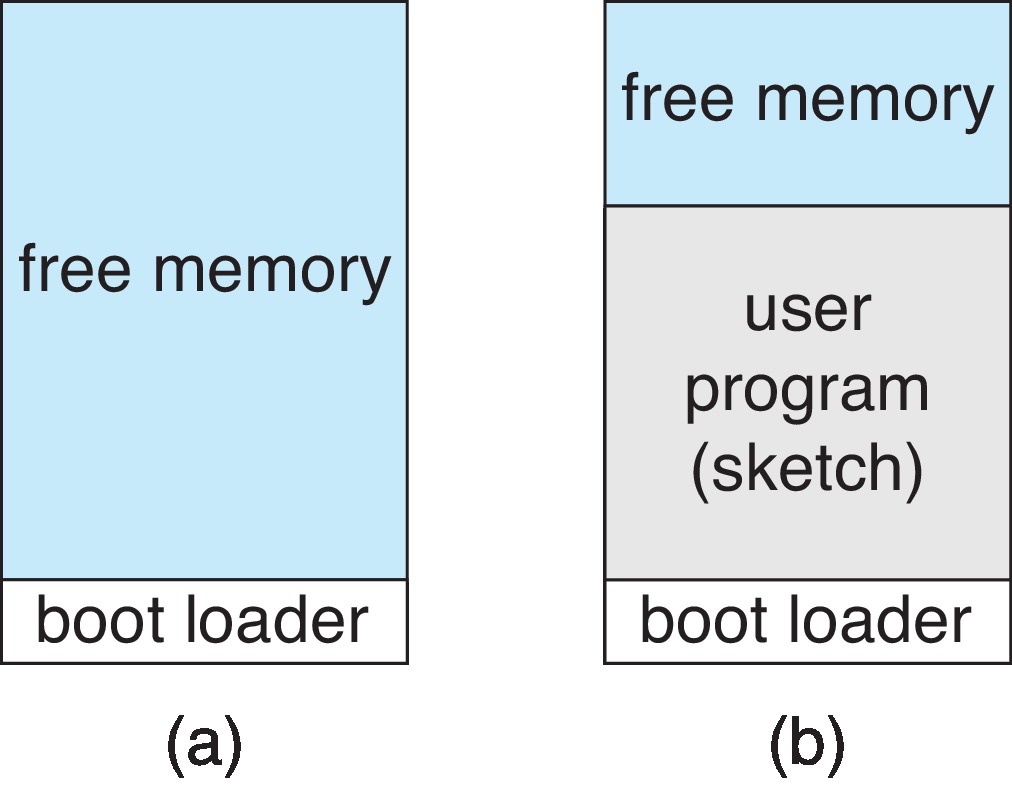
Figure 2.9: Arduino execution (a) At system startup (b) Running a sketch
A parent process can create a child process and control its actions.
We will see a lot of discussion of that later on.
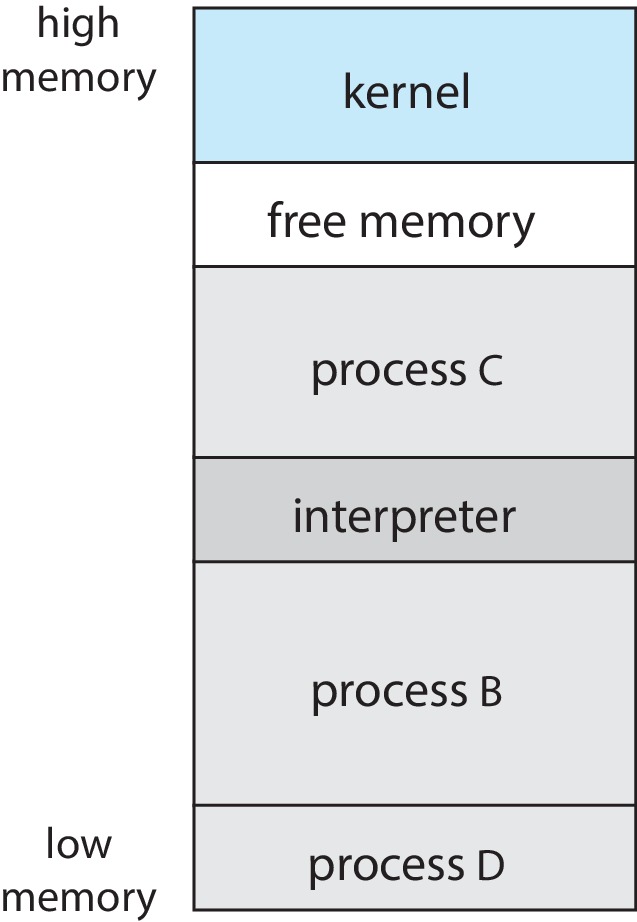
Figure 2.10: FreeBSD running multiple programs
2.3.3.2 File Management: Examples of file management
system calls are create file, delete file, open file, read file,
write file, reposition file, get file attributes, and set file
attributes. Typically we need the same or
similar system calls for directories (folders).
2.3.3.3 Device Management: Examples of device management
system calls are request (exclusive access to) device, release device,
read device, write device, and reposition device. Processes use
devices in a manner that is similar to how processes use files.
2.3.3.4 Information Maintenance: Examples are get current time
and date, get version number, get amount of free memory, get amount of free
disk space, dump memory, and get time profile. Mentioned here, as well
as under Process Control system calls, are get process attributes and set
process attributes.
2.3.3.5 Communication:
Examples of system calls for the message-passing model of
process communication might be
get host ID, get process ID, open connection, close connection,
accept connection, wait for connection, read message, write message,
and close connection.
Examples of system calls for the shared-memory model of process
communication are shared memory attach, read memory, and
write memory.
2.3.3.6 Protection: System calls such as get permission and set
permission inspect and modify the permission settings on resources such
as files and disks. The permission settings are intended to control
which processes or other entities are allowed access to the resources.
Specific users may be authorized or denied access by system calls with
names like allow_user and deny_user.
2.4 System Services
Most computer scientists think about an OS mainly as a kernel, which is the
part of the computing system 'from the system call level down to the hardware.'
So the basic idea is that user programs make requests for OS services by
using system calls, and the real 'guts' of the OS is the
software that runs to perform the system call.
There is system service software, which computer scientists
often see as a layer that is technically outside the kernel, yet somehow
closer to the kernel than software that we normally think of as 'user apps.'
Examples:
some software for manipulating and modifying files and directories
(including searching and editing software);
system performance monitoring software;
programming support like compilers, assemblers, and debuggers;
services for loading parts of programs into memory and making linkages
among them;
software that provides the means for processes to communicate, possibly
via a network;
long-running specialized server processes, like a subsystem (daemon) that
accepts jobs for a printer, or daemons that provide access to remote
file systems.
Most users feel as if "the OS" is high-level system services,
accessed with touch screens, GUIs, or command-line interfaces.
However, to computer scientists "the OS" usually means "the kernel."
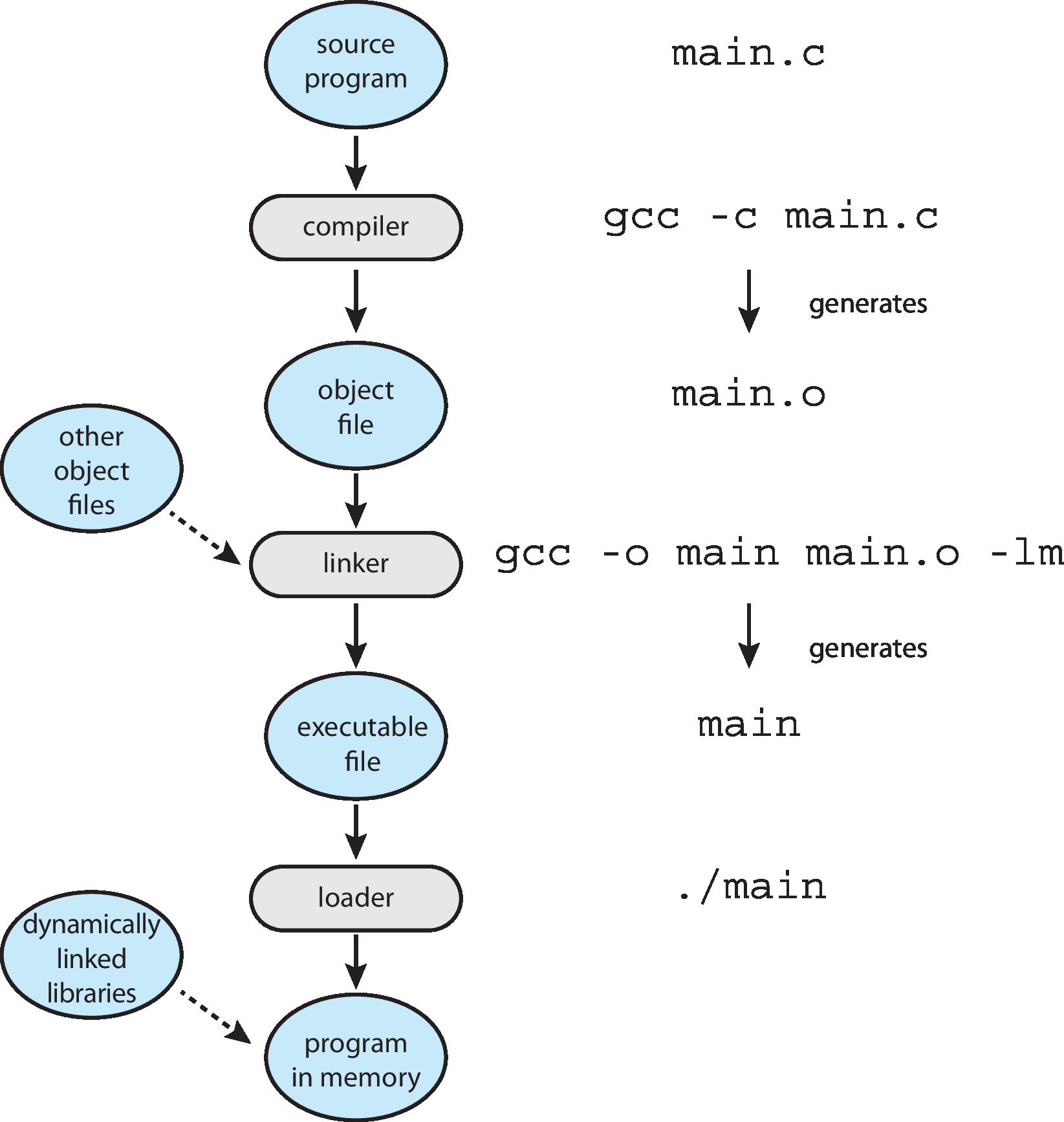
2.5 Linkers and Loaders Figure 2.11: The role of the linker and loader
It is the job of an OS to load programs into the memory of the
computer and execute them.
The job is complex.
One reason is that most programs are really made of different
pieces of code written at different times and stored
in different files.
Another reason is that it is often necessary to move pieces
of running programs from one place in memory to a different
place.
Also, a particular part of a program may not be needed every
time the program executes. So the OS may delay loading some
parts until they are needed.
2.6 Why Applications Are Operating-System Specific
Clearly, if we want to run a program on a computer, we have to write
the instructions in the machine language understood by the computer.
Also, programs need to make system calls, and different operating
systems have different APIs and/or different sets of system calls.
Besides, executable files have different formats on different
computers, and different operating systems utilize different
data structures and algorithms for similar tasks.
For those and other reasons, there is no way to write one program
that will run on dissimilar computing systems.
2.7 Operating-System Design and Implementation
2.7.1 Design Goals: Generally speaking, users want a
system that is convenient, reliable, safe, and fast. Developers want
to satisfy users, but want the system to be easy to build, implement, and
maintain.
2.7.2 Mechanisms and Policies:Policy refers to
what we decide to do. Mechanism refers to how we
do what we do. Policies change over time, so the computing
system tends to be more flexible if we build in mechanisms that can
support a range of policies. The text uses the example of a CPU scheduler
that can give high priority to programs that use the CPU intensively, but
the same scheduler can be 'tweaked' by changing a few numbers in some
tables, and then that scheduler will give priority to the opposite kind
of program, those that use the CPU sparingly.
2.7.3 Implementation:
The implementation of the operating system, that
is the manner in which the ideas of the design are written in programming
language(s).
Typically a few parts of an OS have to be written in
assembly language.
However
modern operating systems are written almost entirely in a
high-level programming language such as C. Actually several
different high level languages may be used to implement
various parts of an operating system. Advantages: code is
developed faster; is smaller, easier to understand, debug and
change; and easier to port.
There are some things that just can't be done with high-level
language statements, for example some device-driver code and
instructions that save and restore register values.
There was a time when writing more of the code in assembly could be
justified because assembly programmers could use 'tricks' that made
routines run faster by some constant factor compared with compiled
high level code. Modern optimizing compilers have eliminated that
advantage almost entirely, although there are still a few
bottlenecks in systems that are 'hand-coded' in assembly language in
order to achieve 'the absolute maximum' efficiency - e.g. the
authors mention interrupt handlers, memory managers, and
CPU schedulers in this regard.
As the authors say: "As is true in other systems, major performance
improvements in operating systems are more likely to be the result
of better data structures and algorithms than of excellent
assembly-language code."
2.8 Operating-System Structure
Principles of good software development that one learns in a
data structures course apply to operating systems, like
modularity and information hiding.
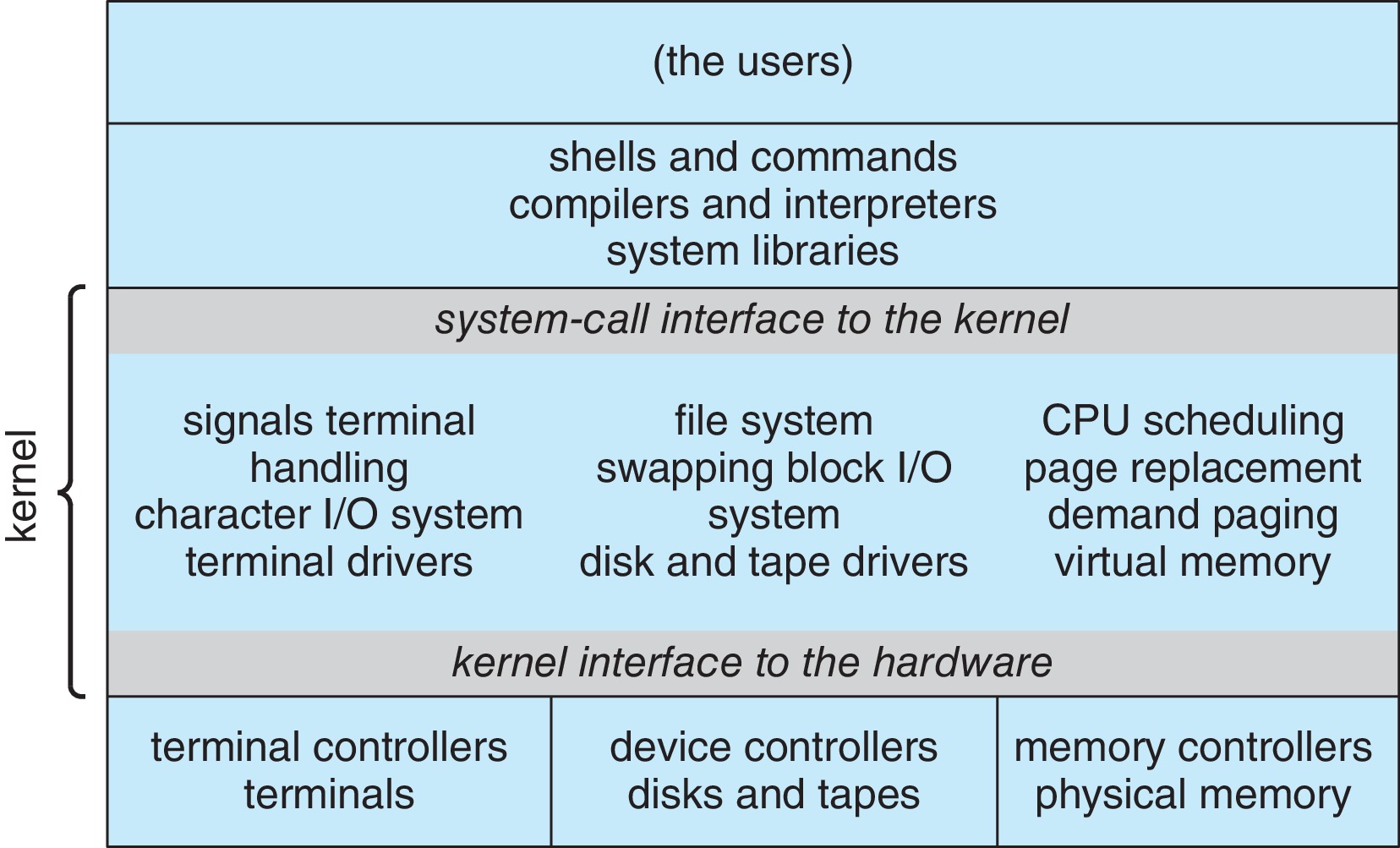
Figure 2.12: Traditional unix system structure
2.8.1 Monolithic Structure: Because users of operating systems
place great value on speed and efficiency, many OS designs feature a
monolithic kernel, which is "a single, static, binary file that
runs in a single address space." A monolithic kernel can have some
modular design aspects, but structural limitations make them difficult to
implement and modify.
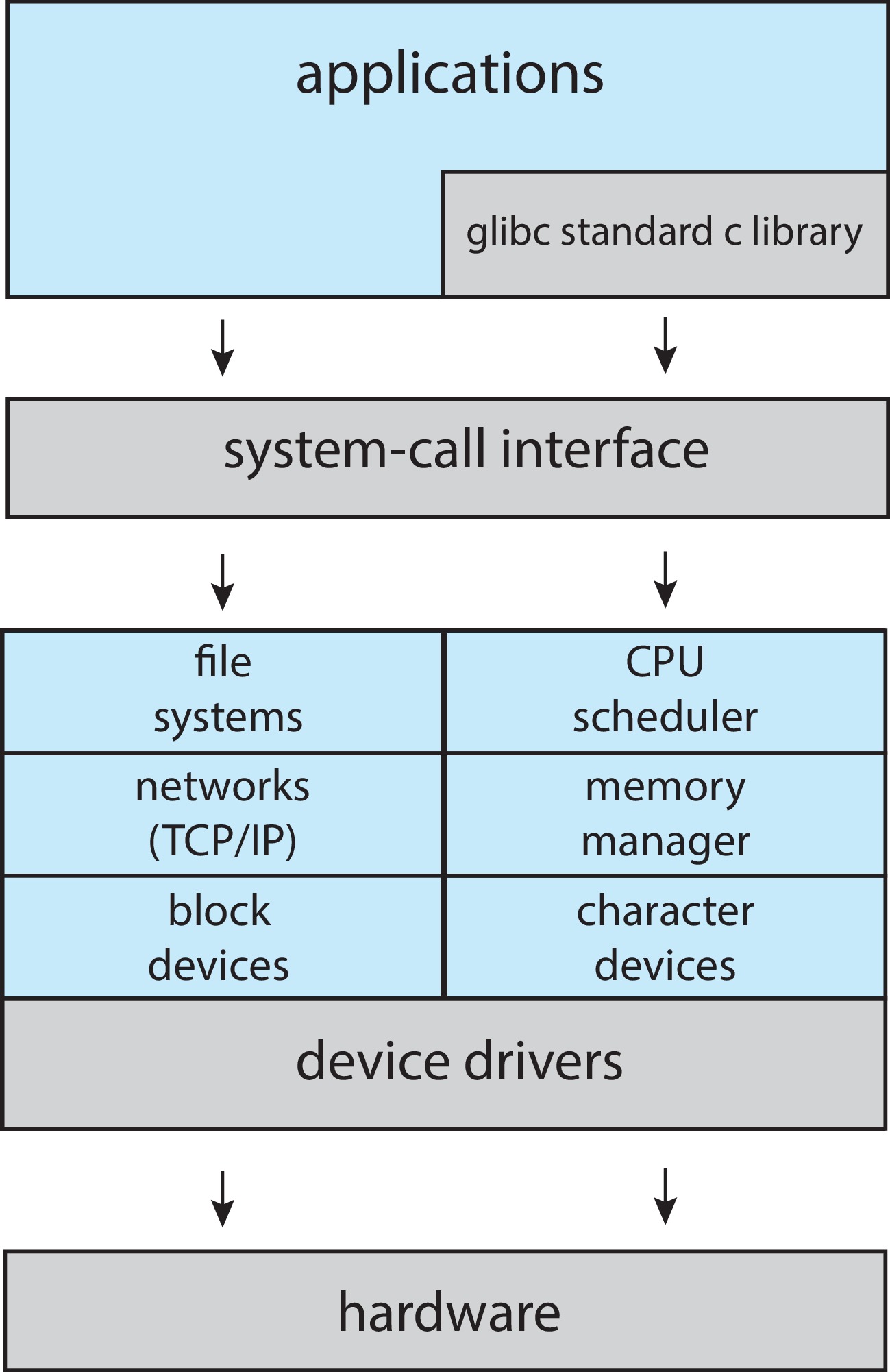
Figure 2.13: Linux system structure
2.8.2 Layered Approach:Figure 2.14: A layered operating system
In a layered approach, we make implementation and modification easier,
by designing the operating system as a set of very
distinct modules called layers.
Each layer is a well-defined abstract data structure (aka, object)
with specific data members and operations (methods).
The design of the layers requires that they be numbered from lowest
to highest, with the lowest being the hardware, and the highest being
the user interface.
Code in one layer, can make calls to functions in other layers, but only if
those functions are in the same or lower layers.
Because of the rules, once the system is designed, it's relatively easy to
build without errors, starting with the hardware, and continuing with the
next highest layer only after the current layer has been implemented and
tested.
It can be quite difficult to design operating system layers in a way that
absolutely assures that a lower layer will never need to use a function in
a higher layer.
Also, a command that originates in a higher layer can result in a
cascade of calls to functions in lower and lower levels. If this
travels through several layers, it can cause delay, which tends
to make the system slow and inefficient.
Many OS designs use the idea of layering, but, to protect the efficiency
of the system, there tend to be just a few large layers, rather than many
small layers.
2.8.3 MicrokernelsFigure 2.15: Architecture of a typical microkernel
Over years, as designers added more and more functionality
to operating systems, it became increasingly difficult to
implement monolithic systems.
Researchers at Carnegie-Mellon University pioneered
microkernel design. The monolithic kernel is
replaced with a microkernel that provides just a few essential
services, and the rest of the operating system is turned into
separate user-level programs.
It is possible for things like file systems and device drivers
to be user-level programs.
Microkernels typically contain some core process and memory management
functions, as well as a message passing service.
When a user program needs a service from the OS, it typically uses
the microkernel's message-passing service. The microkernel makes sure
that the request reaches the necessary part of the OS.
Microkernel architectures are very modular. They are usually relatively
reliable and easy to secure, maintain, modify, and port.
Microkernel architectures can suffer performance problems due to
excessive time spent on message-passing work.
Because of such performance problems, designers tend to just use some
of the ideas of microkernel approach, without building 'pure' microkernel
systems.
2.8.4 Modules
"Modules" is a design style that is currently quite popular.
It has similarities to other models. For example it is similar
to the microkernel model, except that it employs dynamically
loadable kernel modules (LKMs) that are not constrained
to communicate with other modules through the core part of the
kernel. There is also a similarity with the layered model, which
has very clear and separated modules.
The LKMs may be loaded at boot time, or loaded when needed
while the system is running. They can also be deleted
from memory if no longer needed.
An example would be a device driver support module loaded
when a new device is plugged into the computer,
and when the device is unplugged, the module is deleted because
it is not needed any more.
2.8.5 Hybrid System Most real operating systems are not pure
examples of any of the operating system design models discussed
above. Real systems are usually a mix of different design models.
Figure 2.16: Architecture of Apple's macOS and iOS operating systems
2.8.5.1 MacOS and iOS
MacOS and iOS systems have a kernel environment known as Darwin.
Darwin is an example of a hybrid system - a mix of different designs.
It has a Mach micro-kernel and a BSD Unix kernel implemented over
the Mach micro-kernel. Programs can make Mach system calls, and they
can also make BSD system calls.
Figure 2.17: The structure of Darwin
2.8.5.2 Android
Android systems have a modified Linux kernel.
Figure 2.18: Architecture of Google's Android
Windows Subsystem for Linux Windows has some subsystems
that emulate other operating systems. For example, there is a
subsystem for Linux that allows users to run native Linux
applications on a Windows machine. When an application
running in the Linux environment makes a system call, it
is (basically) translated into Windows system calls.
2.9 Building and Booting an Operating System
2.9.1 Operating-System Generation
Systems have to be configured for the specific site to which they
are targeted. We perform system generation when we
put a new host online, providing at that time, for example, a
hostname, host IP address, router IP address.
Other SYSGEN operations possible: disk partitioning, installation of
device drivers, choice of CPU-scheduling algorithm, and setting of
the maximum number of processes to be supported.
The SYSGEN information may be incorporated into the source code for
the OS, and a custom version of the OS then compiled.
Another option, common in PCs, laptops, and mobile devices,
is for the system to be pre-compiled and the SYSGEN
information saved in the form of tabular information in files,
accessed and utilized by the pre-compiled OS in order to achieve the
desired customization effects. For example the system can read its
hostname and default router from a configuration file. Scripts
written during the SYSGEN can be executed each time the computer
boots in order to perform custom setups.
Tables can determine which of certain dynamically loadable modules
are to be loaded at boot time.
SYSGEN may be followed by a linking, but not compiling step, so that
certain modules such as drivers are incorporated into a permanent
executable image of the kernel.
2.9.2 System Boot
Modern computers have ROM that begins executing automatically at
system start-up time. The program may be called BIOS (Basic Input
Output System) or UEFI (Unified Extensible Firmware Interface).
The ROM boot program will typically run diagnostics,
initialize the hardware, and load and execute another program
from secondary memory, or from a network. That program could
be the OS, but it could also be another program that in
turn loads the OS, or there might be more steps in the series.
In some small devices, the entire OS may be in ROM or EPROM.
2.10 Operating-System Debugging
2.10.1 Failure Analysis
Operating systems keep logs of "interesting events." That includes errors made
by processes.
The OS may save a copy of a failed process to a location on secondary memory.
This is called a core dump. (At one time the technology that implemented
main memory was called "magnetic core.") In other words the OS may save all
the process context at the time the error is detected.
The process context is all the information about the process that is
in the main memory.
When the kernel is the process that fails, we often say that the OS crashed,
and the dump may be called a crash dump.
Users, programmers, and computer administrators can use a software package called
a debugger to help figure out what the errors are in a process. It's possible to
examine a running process or a core dump with a debugger.
2.10.2 Performance Monitoring and Tuning There is some discussion here
of tools used in an OS to monitor the performance of the system. People can use
the information to get ideas for improving performance.
Figure 2.19: The Windows 10 task manager
2.10.2.1 Counters
Some of the monitoring involves just keeping counts of
the number of times certain operations are executed.
Linux tools such as ps, top, vmstat, netstat, and iostat use
information from counters.
Many flavors of unix use a special in-memory file system (/proc)
for storing statistics about each current process.
Windows has a tool called the Windows Task Manager that gives
information about current applications and processes, CPU and
memory utilization, and networking statistics.
2.10.3 Tracing
One can use tracing tools to gather data about important "system events."
For example strace traces the system calls a process makes,
gdb functions as a source-level debugger that traces
things the program does, like reading or changing a variable,
perf is a collection of Linux performance tools,
tcpdump collects network packets.
2.10.4 BCC Figure 2.20: The BCC and eBPF tracing tools
BCC is a tracing and debugging toolkit used on Linux systems,
useful for examining interactions between user-level and kernel code.
Through its use, special instructions are dynamically inserted into
a running Linux system, where they are able to sense and record
specific events, such as the invocation of a specific system call,
or the time currently required to perform each disk I/O.
There is a very wide variety of kinds of monitoring that one can
do with BCC. The authors say that it is possible to safely trace
virtually any area of a Linux system, which is very useful for finding
performance bottlenecks and security exploits.